ตลับลูกปืนแม่เหล็ก ตลับลูกปืนแม่เหล็กพร้อมแม่เหล็กถาวร
คำนำ
องค์ประกอบหลักของเครื่องจักรจำนวนมากคือโรเตอร์ที่หมุนอยู่ในตลับลูกปืน การเติบโตของความเร็วการหมุนและความสามารถของเครื่องโรตารี่ที่มีแนวโน้มลดลงพร้อมกันในการลดมวลและพารามิเตอร์โดยรวม ทำให้เกิดปัญหาในการเพิ่มความทนทานของชุดแบริ่งเป็นสำคัญ นอกจากนี้ในหลายพื้นที่ เทคโนโลยีที่ทันสมัยต้องใช้ตลับลูกปืนที่สามารถทำงานได้อย่างน่าเชื่อถือใน สภาวะสุดขั้ว: ในสุญญากาศ ที่สูง และ อุณหภูมิต่ำ, เทคโนโลยีบริสุทธิ์พิเศษ, ในสภาพแวดล้อมที่ก้าวร้าว ฯลฯ การสร้างตลับลูกปืนดังกล่าวเป็นปัญหาทางเทคนิคที่เร่งด่วนเช่นกัน
การแก้ปัญหาเหล่านี้สามารถทำได้โดยการปรับปรุงตลับลูกปืนกลิ้งและเลื่อนแบบดั้งเดิม และการสร้างตลับลูกปืนที่ไม่ใช่แบบดั้งเดิมที่ใช้หลักการทำงานทางกายภาพอื่นๆ
ตลับลูกปืนกลิ้งและเลื่อนแบบดั้งเดิม (ของเหลวและก๊าซ) มาถึงระดับทางเทคนิคขั้นสูงแล้ว อย่างไรก็ตาม ธรรมชาติของกระบวนการที่เกิดขึ้นในนั้นมีจำกัด และบางครั้งทำให้เป็นไปไม่ได้โดยพื้นฐานแล้วที่จะใช้ตลับลูกปืนเหล่านี้เพื่อให้บรรลุเป้าหมายข้างต้น ดังนั้น, ข้อบกพร่องที่สำคัญตลับลูกปืนกลิ้งคือการมีหน้าสัมผัสทางกลระหว่างชิ้นส่วนที่เคลื่อนที่และอยู่กับที่ และความจำเป็นในการหล่อลื่นของรางน้ำ ไม่มีการสัมผัสทางกลในตลับลูกปืนธรรมดา แต่จำเป็นต้องใช้ระบบน้ำมันหล่อลื่นเพื่อสร้างชั้นการหล่อลื่นและผนึกชั้นนี้ เห็นได้ชัดว่าการปรับปรุงหน่วยซีลสามารถลดลงได้ แต่ไม่สามารถขจัดการแทรกซึมของสารหล่อลื่นและ สภาพแวดล้อมภายนอก.
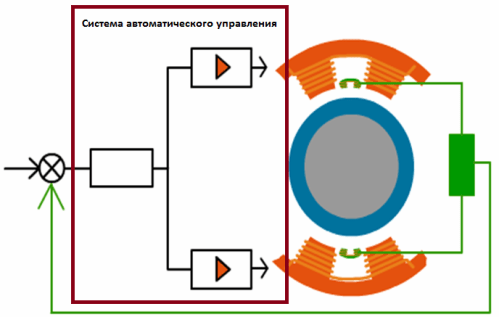
แบริ่งปราศจากข้อเสียเหล่านี้ซึ่งแม่เหล็กและ สนามไฟฟ้า. ในหมู่พวกเขา ตลับลูกปืนแม่เหล็กแบบแอกทีฟ (AMP) นั้นมีประโยชน์มากที่สุด การทำงานของ AMN ขึ้นอยู่กับหลักการที่รู้จักกันดีของการระงับแม่เหล็กแบบแอคทีฟของตัวเฟอร์โรแมกเนติก: ร่างกายมีความเสถียรในตำแหน่งที่กำหนดโดยแรงดึงดูดแม่เหล็กที่กระทำต่อร่างกายจากแม่เหล็กไฟฟ้าที่ควบคุม กระแสในขดลวดแม่เหล็กไฟฟ้าถูกสร้างขึ้นโดยใช้ระบบ ระบบควบคุมอัตโนมัติซึ่งประกอบด้วยเซนเซอร์ตรวจจับการเคลื่อนไหวของร่างกาย ตัวควบคุมอิเล็กทรอนิกส์ และเพาเวอร์แอมป์ที่ขับเคลื่อนโดยแหล่งภายนอก พลังงานไฟฟ้า.
ตัวอย่างแรก การใช้งานจริงสารแขวนลอยแม่เหล็กแบบแอคทีฟในเครื่องมือวัดมีอายุย้อนไปถึงยุค 40 ของศตวรรษที่ XX พวกเขาเกี่ยวข้องกับชื่อของ D. Beams และ D. Hriesinger (USA) และ O. G. Katsnelson และ A. S. Edelstein (USSR) เปิดใช้งานครั้งแรก แบริ่งแม่เหล็กถูกเสนอและศึกษาทดลองในปี 1960 โดย R. Sixsmith (USA) กว้าง การใช้งานจริง AMS ในประเทศและต่างประเทศของเราเริ่มขึ้นในช่วงต้นทศวรรษที่ 70 ของศตวรรษที่ XX
การไม่มีการสัมผัสทางกลและความจำเป็นในการหล่อลื่นใน AMP ทำให้พวกเขามีแนวโน้มที่ดีในหลายด้านของเทคโนโลยี ประการแรกคือ: กังหันและปั๊มในวิศวกรรมสุญญากาศและอุณหภูมิต่ำ เครื่องจักรสำหรับเทคโนโลยีบริสุทธิ์พิเศษและสำหรับการทำงานในสภาพแวดล้อมที่ก้าวร้าว เครื่องจักรและอุปกรณ์สำหรับการติดตั้งนิวเคลียร์และอวกาศ ดูดวง; อุปกรณ์เก็บพลังงานเฉื่อย เช่นเดียวกับผลิตภัณฑ์สำหรับวิศวกรรมเครื่องกลทั่วไปและการผลิตเครื่องมือ - การเจียรและกัดแกนหมุนความเร็วสูง เครื่องจักรสิ่งทอ เครื่องหมุนเหวี่ยง, กังหัน, เครื่องสมดุล, แท่นสั่นสะเทือน, หุ่นยนต์, แม่นยำ เครื่องมือวัดเป็นต้น
อย่างไรก็ตาม แม้จะประสบความสำเร็จ แต่ AMJI ก็ถูกนำไปใช้งานช้ากว่าที่คาดไว้มากจากการคาดการณ์ในช่วงต้นทศวรรษ 1970 ประการแรก เกิดจากการที่อุตสาหกรรมนวัตกรรมยอมรับอย่างช้าๆ ซึ่งรวมถึง AMS เช่นเดียวกับนวัตกรรมอื่นๆ เพื่อที่จะเป็นที่ต้องการ AMP จำเป็นต้องได้รับความนิยม
น่าเสียดายที่ G. Schweitzer มีหนังสือเล่มเดียวเท่านั้นที่อุทิศให้กับตลับลูกปืนแม่เหล็กแบบแอคทีฟในขณะที่เขียนบทความนี้ H. Bleulerand A. Traxler "Active magnetic bearings", ETH Zurich, 1994, 244 p. ตีพิมพ์เป็นภาษาอังกฤษและ เยอรมัน. หนังสือเล่มนี้มีปริมาณน้อยโดยหลักแล้วมุ่งเป้าไปที่ผู้อ่านที่กำลังทำตามขั้นตอนแรกในการทำความเข้าใจปัญหาที่เกิดขึ้นเมื่อสร้าง AMS ด้วยความต้องการเพียงเล็กน้อยในด้านวิศวกรรมและภูมิหลังทางคณิตศาสตร์ของผู้อ่าน ผู้เขียนจึงสร้างแนวคิดและแนวความคิดหลักในลำดับที่ไตร่ตรองมาอย่างดี ซึ่งช่วยให้ผู้เริ่มต้นใช้งานได้อย่างรวดเร็วและเชี่ยวชาญด้านแนวคิดในด้านใหม่สำหรับตนเอง ไม่ต้องสงสัยเลย หนังสือเล่มนี้เป็นปรากฏการณ์ที่น่าทึ่ง และบทบาทการประชาสัมพันธ์ของหนังสือเล่มนี้แทบจะประเมินค่าสูงไปไม่ได้
ผู้อ่านอาจถามว่าควรเขียนเอกสารจริงหรือไม่ ไม่ใช่แค่การแปลหนังสือที่กล่าวถึงข้างต้น อย่างแรก ตั้งแต่ปี 1992 ฉันได้รับเชิญให้ไปบรรยายเกี่ยวกับ AMS ที่มหาวิทยาลัยในรัสเซีย ฟินแลนด์และสวีเดน หนังสือเติบโตจากการบรรยายเหล่านี้ ประการที่สอง เพื่อนร่วมงานของฉันหลายคนแสดงความปรารถนาที่จะมีหนังสือเกี่ยวกับ LMP ที่เขียนขึ้นสำหรับนักพัฒนาเครื่อง AML ประการที่สาม ฉันยังตระหนักว่าวิศวกรหลายคนที่ไม่เชี่ยวชาญใน AMB เลยต้องการหนังสือที่สำรวจวัตถุควบคุมเช่นแม่เหล็กไฟฟ้า
จุดประสงค์ของหนังสือเล่มนี้คือเพื่อให้วิศวกรมีวิธีการสร้างแบบจำลองทางคณิตศาสตร์ การสังเคราะห์และการวิเคราะห์ AMP และด้วยเหตุนี้จึงส่งเสริมความสนใจในด้านเทคโนโลยีใหม่นี้ ฉันไม่สงสัยเลยว่าหนังสือเล่มนี้จะเป็นประโยชน์กับนักเรียนหลายๆ คนด้วย เทคนิคพิเศษโดยเฉพาะการออกแบบหลักสูตรและอนุปริญญา เมื่อเขียนหนังสือเล่มนี้ ฉันอาศัยประสบการณ์ 20 ปีในสาขา AMB ในฐานะผู้อำนวยการด้านวิทยาศาสตร์ของห้องปฏิบัติการวิจัยของตลับลูกปืนแม่เหล็กที่สถาบัน Pskov Polytechnic Institute of the St. มหาวิทยาลัยเทคนิค.
หนังสือเล่มนี้มี 10 บท บทที่ 1 ให้ คำอธิบายสั้นของสารแขวนลอยแม่เหล็กไฟฟ้าที่เป็นไปได้ทุกประเภท โดยมีจุดประสงค์เพื่อขยายขอบเขตอันไกลโพ้นของผู้อ่าน บทที่ 2 มุ่งเป้าไปที่ผู้ใช้ AMB แนะนำให้ผู้อ่านรู้จักกับเทคโนโลยีตลับลูกปืนแม่เหล็กแบบแอกทีฟ ซึ่งเป็นประวัติของการพัฒนา การออกแบบ ลักษณะเฉพาะ ปัญหาการพัฒนา และตัวอย่างบางส่วน การใช้งานจริง. บทที่ 3 และ 4 ให้วิธีการคำนวณวงจรแม่เหล็กแบริ่ง แม่เหล็กไฟฟ้าที่เป็นวัตถุควบคุมได้รับการศึกษาในบทที่ 5 ในบทที่ 6 ปัญหาของการสังเคราะห์ตัวควบคุมและการวิเคราะห์ไดนามิกของการระงับแม่เหล็กแบบขั้นตอนเดียวจะได้รับการแก้ไข นี่คือบทเกี่ยวกับวิธีการควบคุม gimbal และสิ่งที่ขัดขวางการได้รับประสิทธิภาพแบบไดนามิกที่คุณต้องการ จุดศูนย์กลางถูกครอบครองโดยบทที่ 7 ซึ่งพิจารณาถึงปัญหาในการควบคุมระบบกันสะเทือนของโรเตอร์แข็งที่มีอิสระห้าองศา ตรวจสอบการทำงานร่วมกันของระบบกันกระเทือนและมอเตอร์ขับเคลื่อน และยังกล่าวถึงปัญหาการสร้างตลับลูกปืนแบบไร้แบริ่ง เครื่องจักรไฟฟ้า. อิทธิพลของการเปลี่ยนรูปการดัดงอแบบยืดหยุ่นของโรเตอร์ที่มีต่อไดนามิกของระบบกันกระเทือนมีอธิบายไว้ในบทที่ 8 บทที่ 9 ใช้สำหรับการควบคุมระบบกันสะเทือนแบบดิจิทัล ในบทสุดท้ายที่ 10 มีการพิจารณาแง่มุมไดนามิกหลายประการที่เกี่ยวข้องกับการใช้ระบบกันสะเทือนของโรเตอร์ใน AMB
สำหรับรายการอ้างอิงท้ายเล่ม ข้าพเจ้าไม่ได้พยายามรวมบทความที่มีความสำคัญทางประวัติศาสตร์เกี่ยวกับ AML ไว้ในนั้น และข้าพเจ้าขอการอภัยจากนักวิจัยเหล่านั้นซึ่งไม่ได้กล่าวถึงการมีส่วนร่วมในด้านนี้
เนื่องจากช่วงของปัญหากว้างมาก จึงไม่สามารถรักษาระบบเดียวได้ สัญลักษณ์ตลอดทั้งเล่ม อย่างไรก็ตาม แต่ละบทใช้ ระบบถาวรการกำหนด
ฉันรู้สึกขอบคุณอาจารย์ อาจารย์ David Rakhmilyevich Merknin และ Anatoly Saulovitch Kelzon อาจารย์ของฉัน พวกเขามีส่วนอย่างมากในการจัดวางหนังสือเล่มนี้ ฉันอยากจะขอบคุณเพื่อนร่วมงานของฉันในห้องปฏิบัติการที่รองรับแม่เหล็กและมหาวิทยาลัย โดยเฉพาะอย่างยิ่ง Fedor Georgievich Kochevin, Mikhail Vadimovich Afanasiev Valentin Vasilyevich Andreen, Sergey Vladimirovich Smirnov, Sergey Gennadyevich Stebikhov และ Igor Ivanovich Morozov ซึ่งความพยายามสร้างเครื่องจักรจำนวนมากด้วย AMB ฉันยังสนุกกับการสนทนาและ การทำงานเป็นทีมร่วมกับศาสตราจารย์ Kamil Shamsuddinovich Khodjaen และรองศาสตราจารย์ Vladimir Alexandrovich Andreev, Valery Georgievich Bogov และ Vyacheslav Grigorievich Matsevich ฉันยังต้องการสังเกตการมีส่วนร่วมของนักศึกษาระดับบัณฑิตศึกษาและนักศึกษาระดับสูงกว่าปริญญาตรีที่ทำงานกับฉันด้วยความกระตือรือร้นอย่างมากในด้าน AMS - เหล่านี้คือ Grigory Mikhailovich Kraizman, Nikolai Vadimovich Khmylko, Arkady Grigoryevich Khrostitsky, Nikolai Mikhailovich Ilyin, Alexander Mikhailovich Vetlntsyn และ Pavel วาซิลีเยวิช คิเซเลฟ การกล่าวถึงเป็นพิเศษสมควรได้รับความช่วยเหลือด้านเทคนิคในการเตรียมต้นฉบับสำหรับตีพิมพ์โดย Elena Vladimirovna Zhuravleva และ Andrey Semenovich Leontiev
ฉันอยากจะขอบคุณ Pskov Engineering Company และ Pskov Polytechnic Institute สำหรับความช่วยเหลือในการจัดหาเงินทุนสำหรับการตีพิมพ์หนังสือ
เมื่อพูดถึงตลับลูกปืนแม่เหล็กหรือระบบกันสะเทือนแบบไม่สัมผัส เราไม่สามารถมองข้ามคุณสมบัติที่โดดเด่นของมันได้: ไม่จำเป็นต้องมีการหล่อลื่น ไม่มีชิ้นส่วนที่ถู ดังนั้นจึงไม่มีการสูญเสียแรงเสียดทาน ระดับการสั่นสะเทือนต่ำมาก ความเร็วสัมพัทธ์สูง การใช้พลังงานต่ำ , ระบบอัตโนมัติควบคุมและตรวจสอบสภาพของแบริ่ง, ความสามารถในการปิดผนึก.
ข้อดีทั้งหมดเหล่านี้ทำให้ตลับลูกปืนแม่เหล็ก ทางออกที่ดีที่สุดสำหรับการใช้งานหลายประเภท: สำหรับกังหันก๊าซ สำหรับเทคโนโลยีอุณหภูมิต่ำ ในเครื่องกำเนิดไฟฟ้าความเร็วสูง สำหรับ อุปกรณ์สูญญากาศสำหรับเครื่องมือกลและอุปกรณ์อื่น ๆ รวมถึงความแม่นยำสูงและความเร็วสูง (ประมาณ 100,000 รอบต่อนาที) ซึ่งไม่มีการสูญเสียทางกล การรบกวน และข้อผิดพลาดเป็นสิ่งสำคัญ
โดยทั่วไป ตลับลูกปืนแม่เหล็กแบ่งออกเป็นสองประเภท: ตลับลูกปืนแม่เหล็กแบบพาสซีฟและแอคทีฟ ตลับลูกปืนแม่เหล็กแบบพาสซีฟถูกสร้างขึ้น แต่วิธีนี้ยังห่างไกลจากอุดมคติดังนั้นจึงไม่ค่อยได้ใช้ ยืดหยุ่นและกว้างขึ้น ความสามารถทางเทคนิคเปิดด้วยตลับลูกปืนแบบแอคทีฟที่สร้างสนามแม่เหล็ก กระแสสลับในขดลวดแกน
วิธีการทำงานของตลับลูกปืนแม่เหล็กแบบไม่สัมผัส
การทำงานของระบบกันสะเทือนหรือแบริ่งแม่เหล็กแบบแอคทีฟนั้นขึ้นอยู่กับหลักการของการลอยด้วยคลื่นแม่เหล็กไฟฟ้า - การลอยตัวโดยใช้สนามไฟฟ้าและสนามแม่เหล็ก ที่นี่การหมุนของเพลาในตลับลูกปืนเกิดขึ้นโดยไม่มี การสัมผัสทางกายภาพพื้นผิวซึ่งกันและกัน ด้วยเหตุนี้การหล่อลื่นจึงถูกละเว้นอย่างสมบูรณ์และยังคงไม่มีการสึกหรอทางกล สิ่งนี้จะเพิ่มความน่าเชื่อถือและประสิทธิภาพของเครื่องจักร
ผู้เชี่ยวชาญยังสังเกตเห็นถึงความสำคัญของการควบคุมตำแหน่งของเพลาโรเตอร์ ระบบเซ็นเซอร์ตรวจสอบตำแหน่งของเพลาอย่างต่อเนื่องและส่งสัญญาณไปยังระบบควบคุมอัตโนมัติเพื่อตำแหน่งที่แม่นยำโดยการแก้ไขตำแหน่ง สนามแม่เหล็กสเตเตอร์ - แรงดึงดูดที่ด้านที่ต้องการของเพลานั้นแข็งแกร่งขึ้นหรืออ่อนลงโดยการปรับกระแสในขดลวดสเตเตอร์ของตลับลูกปืนที่ใช้งาน

ตลับลูกปืนแอคทีฟเทเปอร์สองอันหรือรัศมีสองอันและหนึ่งแกน แบริ่งที่ใช้งาน- อนุญาตให้มีการระงับโรเตอร์แบบไร้สัมผัสในอากาศอย่างแท้จริง ระบบควบคุมกิมบอลทำงานอย่างต่อเนื่องและสามารถเป็นแบบดิจิทัลหรือแอนะล็อกได้ สิ่งนี้ทำให้มั่นใจได้ถึงการยึดเกาะสูง ความสามารถในการรับน้ำหนักสูง และความแข็งที่ปรับได้และการหน่วง เทคโนโลยีนี้ช่วยให้แบริ่งทำงานในระดับต่ำและ อุณหภูมิสูงในสุญญากาศ ที่ความเร็วสูง และในสภาวะที่ต้องการการฆ่าเชื้อที่เพิ่มขึ้น
จากข้างต้น จะเห็นได้ชัดเจนว่าส่วนประกอบหลักของระบบกันสะเทือนแม่เหล็กแบบแอคทีฟคือ: แบริ่งแม่เหล็กและ ระบบอัตโนมัติ ระบบควบคุมอิเล็กทรอนิกส์. แม่เหล็กไฟฟ้าจะกระทำต่อโรเตอร์ตลอดเวลาจากด้านต่างๆ และการกระทำของแม่เหล็กไฟฟ้าจะขึ้นอยู่กับระบบควบคุมอิเล็กทรอนิกส์

โรเตอร์ของตลับลูกปืนแม่เหล็กเรเดียลนั้นติดตั้งแผ่นแม่เหล็กเฟอร์โรแมกเนติก ซึ่งสนามแม่เหล็กจากขดลวดสเตเตอร์ทำหน้าที่ อันเป็นผลมาจากการที่โรเตอร์ถูกแขวนไว้ที่กึ่งกลางของสเตเตอร์โดยไม่ต้องสัมผัสมัน เซ็นเซอร์อุปนัยตรวจสอบตำแหน่งของโรเตอร์ตลอดเวลา การเบี่ยงเบนจากตำแหน่งที่ถูกต้องส่งผลให้เกิดสัญญาณที่ใช้กับคอนโทรลเลอร์ ในทางกลับกัน เขาส่งโรเตอร์ไปยังตำแหน่งที่ต้องการ ระยะห่างในแนวรัศมีสามารถอยู่ระหว่าง 0.5 ถึง 1 มม.
ตลับลูกปืนกันรุนแม่เหล็กทำหน้าที่ในลักษณะเดียวกัน แม่เหล็กไฟฟ้าในรูปของวงแหวนจับจ้องอยู่ที่เพลาของจานขับ แม่เหล็กไฟฟ้าตั้งอยู่บนสเตเตอร์ เซ็นเซอร์แกนตั้งอยู่ที่ปลายเพลา
ในการยึดโรเตอร์ของเครื่องอย่างปลอดภัยในระหว่างการหยุดหรือในขณะที่ระบบจับยึดล้มเหลว จะใช้ตลับลูกปืนนิรภัยซึ่งได้รับการแก้ไขเพื่อให้ช่องว่างระหว่างโรเตอร์กับเพลาตั้งไว้เท่ากับครึ่งหนึ่งในตลับลูกปืนแม่เหล็ก .
ระบบ การควบคุมอัตโนมัติตั้งอยู่ในตู้และรับผิดชอบการปรับกระแสไฟที่ไหลผ่านแม่เหล็กไฟฟ้าให้ถูกต้องตามสัญญาณจากเซ็นเซอร์ตำแหน่งโรเตอร์ พลังของแอมพลิฟายเออร์สัมพันธ์กับความแรงสูงสุดของแม่เหล็กไฟฟ้า ขนาดของช่องว่างอากาศ และเวลาตอบสนองของระบบต่อการเปลี่ยนแปลงในตำแหน่งของโรเตอร์
ความสามารถของตลับลูกปืนแม่เหล็กแบบไม่สัมผัส
ความเร็วในการหมุนสูงสุดของโรเตอร์ในตลับลูกปืนแม่เหล็กแบบเรเดียลนั้นจำกัดโดยความสามารถของเพลตโรเตอร์แบบเฟอร์โรแมกเนติกในการต้านทานแรงเหวี่ยงหนีศูนย์กลางเท่านั้น โดยทั่วไป ขีดจำกัดความเร็วรอบข้างคือ 200 ม./วินาที ในขณะที่แบริ่งแม่เหล็กแนวแกน ขีดจำกัดจะถูกจำกัดโดยความต้านทานของเหล็กหล่อแทงที่ 350 ม./วินาที สำหรับวัสดุทั่วไป
ขึ้นอยู่กับเฟอร์โรแม่เหล็กที่ใช้และ โหลดสูงสุดซึ่งแบริ่งที่มีเส้นผ่านศูนย์กลางและความยาวของสเตเตอร์แบริ่งสามารถทนต่อได้ สำหรับวัสดุมาตรฐาน แรงดันสูงสุดคือ 0.9 N/cm2 ซึ่งน้อยกว่าตลับลูกปืนแบบสัมผัสทั่วไป อย่างไรก็ตาม การสูญเสียน้ำหนักสามารถชดเชยได้ด้วยความเร็วรอบวงสูงด้วยขนาดเส้นผ่านศูนย์กลางเพลาที่เพิ่มขึ้น
การใช้พลังงานของตลับลูกปืนแม่เหล็กแบบแอคทีฟนั้นไม่สูงมาก กระแสน้ำวนทำให้เกิดการสูญเสียมากที่สุดในตลับลูกปืน แต่น้อยกว่าพลังงานที่สูญเสียไปเมื่อใช้ตลับลูกปืนทั่วไปในเครื่องจักรถึงสิบเท่า ข้อต่อ ตัวป้องกันความร้อน และอุปกรณ์อื่นๆ ถูกตัดออก ตลับลูกปืนทำงานอย่างมีประสิทธิภาพในสุญญากาศ ฮีเลียม ออกซิเจน น้ำทะเล ฯลฯ ช่วงอุณหภูมิอยู่ระหว่าง -253°C ถึง +450°C
ข้อเสียเปรียบของตลับลูกปืนแม่เหล็ก
ในขณะเดียวกันก็มีแบริ่งแม่เหล็กและข้อเสีย
ประการแรก ความจำเป็นในการใช้ตลับลูกปืนกลิ้งเสริมที่สามารถทนต่อความล้มเหลวได้สูงสุดสองครั้ง หลังจากนั้นจะต้องเปลี่ยนใหม่
ประการที่สอง ความซับซ้อนของระบบควบคุมอัตโนมัติ ซึ่งหากล้มเหลวจะต้องได้รับการซ่อมแซมที่ซับซ้อน
ประการที่สามอุณหภูมิของขดลวดสเตเตอร์ของตลับลูกปืนจะเพิ่มขึ้นที่กระแสสูง - ขดลวดร้อนขึ้นและต้องการการระบายความร้อนส่วนบุคคลโดยเฉพาะของเหลว
ในที่สุด การใช้วัสดุของตลับลูกปืนแบบไม่สัมผัสกลับกลายเป็นว่าสูง เนื่องจากพื้นที่ผิวของตลับลูกปืนต้องกว้างขวางเพื่อรักษาแรงแม่เหล็กที่เพียงพอ - แกนสเตเตอร์ของตลับลูกปืนมีขนาดใหญ่และหนัก บวกกับปรากฏการณ์ความอิ่มตัวของแม่เหล็ก

แต่ถึงแม้จะมีข้อบกพร่องที่เห็นได้ชัด ตลับลูกปืนแม่เหล็กก็ถูกนำมาใช้กันอย่างแพร่หลายแล้ว รวมถึงใน ระบบแสงความแม่นยำสูงและในการติดตั้งเลเซอร์ ไม่ทางใดก็ทางหนึ่งตั้งแต่กลางศตวรรษที่ผ่านมาตลับลูกปืนแม่เหล็กได้รับการปรับปรุงตลอดเวลา
หลังจากดูวิดีโอของเพื่อนแต่ละคนเช่น
ฉันตัดสินใจและฉันจะสังเกตเห็นในกระทู้นี้ ในความคิดของฉัน วิดีโอนี้ค่อนข้างไม่รู้หนังสือ จึงค่อนข้างเป็นไปได้ที่จะผิวปากจากแผงขายของ
เมื่อพิจารณาแผนการหลายอย่างในหัวของฉันโดยดูหลักการของการระงับที่ส่วนกลางในวิดีโอของ Beletsky ทำความเข้าใจว่าของเล่น "levitrnon" ทำงานอย่างไรฉันจึงมาในรูปแบบที่เรียบง่าย เป็นที่ชัดเจนว่าควรมีเดือยรองรับสองเดือยบนแกนเดียวกัน สไปค์นั้นทำมาจากเหล็ก และวงแหวนถูกยึดอย่างแน่นหนาบนแกน แทนที่จะเป็นวงแหวนทึบ มันค่อนข้างเป็นไปได้ที่จะวางแม่เหล็กที่มีขนาดไม่ใหญ่มากในรูปของปริซึมหรือทรงกระบอกที่จัดเรียงเป็นวงกลม หลักการเหมือนกับในของเล่นชื่อดัง "ลิวิตรอน" แทนที่จะใช้โมเมนต์ geroscopic ซึ่งป้องกันไม่ให้ยอดพลิกคว่ำ เราใช้ "สเปรด" ระหว่างอัฒจันทร์ที่ยึดกับแกนไว้อย่างแน่นหนา
ด้านล่างเป็นวิดีโอที่มีของเล่น "Livitron"
และนี่คือแผนงานที่ฉันเสนอ อันที่จริงนี่คือของเล่นในวิดีโอด้านบน แต่อย่างที่ฉันพูด มันต้องการบางอย่างที่จะไม่ยอมให้แนวรับพุ่งสูงขึ้น วิดีโอด้านบนใช้แรงบิดไจโร ฉันใช้จานรองแก้วสองตัวและตัวเว้นวรรคระหว่างพวกมัน
ลองปรับการทำงานของการออกแบบนี้ตามที่ฉันเห็น:
แม่เหล็กขับไล่ ความอ่อนแอ- คุณต้องทำให้เดือยแหลมเหล่านี้เสถียรตามแกน ฉันใช้ความคิดนี้: แม่เหล็กพยายามผลักเข็มเข้าไปในพื้นที่ที่มีความแรงของสนามต่ำสุดเพราะ สไปค์มีการสะกดจิตตรงข้ามกับวงแหวนและตัวแม่เหล็กเองก็เป็นวงแหวนซึ่งในพื้นที่ขนาดใหญ่เพียงพอตามแกน ความเข้มจะน้อยกว่าที่ขอบ เหล่านั้น. การกระจายความเข้มของสนามแม่เหล็กในรูปร่างคล้ายกับแก้ว - ความเข้มสูงสุดในผนังและต่ำสุดบนแกน
สไปค์ควรเสถียรตามแกนในขณะที่ถูกผลักออกจากแม่เหล็กวงแหวนไปยังพื้นที่ที่มีความแรงของสนามต่ำสุด เหล่านั้น. หากมีเดือยแหลมสองอันบนแกนเดียวกันและแม่เหล็กวงแหวนได้รับการแก้ไขอย่างแน่นหนา แกนควร "แขวน"
ปรากฎว่าอยู่ในโซนที่มีความแรงของสนามต่ำกว่าซึ่งเป็นที่นิยมอย่างกระฉับกระเฉงที่สุด
หลังจากค้นดูในอินเทอร์เน็ต ฉันพบการออกแบบที่คล้ายกัน:

นอกจากนี้ยังมีการสร้างโซนที่มีความตึงเครียดน้อยกว่าและยังตั้งอยู่ตามแกนระหว่างแม่เหล็กและใช้มุมด้วย โดยทั่วไป อุดมการณ์จะคล้ายกันมาก แต่ถ้าเราพูดถึงตลับลูกปืนขนาดกะทัดรัด ตัวเลือกด้านบนจะดูดีกว่า แต่ต้องใช้แม่เหล็กที่มีรูปร่างพิเศษ เหล่านั้น. ความแตกต่างระหว่างแบบแผนคือฉันผลักส่วนรองรับเข้าไปในโซนด้วยความตึงเครียดน้อยลงและในรูปแบบด้านบนการก่อตัวของโซนดังกล่าวทำให้มั่นใจได้ถึงตำแหน่งบนแกน
เพื่อความชัดเจนในการเปรียบเทียบ ฉันวาดไดอะแกรมใหม่: 
พวกมันเป็นภาพสะท้อน โดยทั่วไป แนวคิดนี้ไม่ใช่เรื่องใหม่ - พวกเขาทั้งหมดหมุนไปในสิ่งเดียวกัน ฉันยังสงสัยว่าผู้เขียนวิดีโอด้านบนไม่ได้มองหาวิธีแก้ปัญหาที่เสนอ 
นี่เป็นเกือบหนึ่งต่อหนึ่งหากกรวยหยุดไม่แข็ง แต่ประกอบ - วงจรแม่เหล็ก + แม่เหล็กรูปวงแหวน วงจรของฉันจะกลายเป็น ฉันยังจะบอกว่าแนวคิดที่ไม่ได้รับการปรับให้เหมาะสมเริ่มต้นคือภาพด้านล่าง เฉพาะภาพด้านบนเท่านั้นที่ใช้งานได้สำหรับ "แรงดึงดูด" ของโรเตอร์ และเดิมฉันวางแผนที่จะ "ขับไล่" 
สำหรับผู้ที่มีพรสวรรค์เป็นพิเศษ ฉันต้องการทราบว่าการระงับนี้ไม่ละเมิดทฤษฎีบทของ Earnshaw (ข้อห้าม) ความจริงก็คือเราไม่ได้พูดถึงที่นี่เกี่ยวกับการระงับแม่เหล็กอย่างหมดจดโดยไม่ต้องตรึงจุดศูนย์กลางบนแกนอย่างเข้มงวดเช่น แกนหนึ่งได้รับการแก้ไขอย่างแน่นหนาไม่มีอะไรจะทำงาน เหล่านั้น. มันเกี่ยวกับการเลือกจุดศูนย์กลางและไม่มีอะไรเพิ่มเติม
อันที่จริง หากคุณดูวิดีโอของ Beletsky คุณจะเห็นว่ามีการใช้การกำหนดค่าฟิลด์เดียวกันโดยประมาณทุกที่ สิ่งเดียวที่ขาดหายไปคือ สัมผัสสุดท้าย. วงจรแม่เหล็กรูปกรวยกระจาย "แรงผลัก" ตามสองแกน แต่ Earnshaw สั่งให้แกนที่สามได้รับการแก้ไขต่างกัน ฉันไม่ได้โต้แย้งและแก้ไขกลไกอย่างเข้มงวด ทำไม Beletsky ไม่ลองใช้ตัวเลือกนี้ฉันไม่รู้ อันที่จริงเขาต้องการ "ลิวิตรอน" สองตัว - แก้ไขขาตั้งบนแกนแล้วเชื่อมต่อเข้ากับยอดด้วยท่อทองแดง
คุณยังสามารถสังเกตได้ว่าคุณสามารถใช้ทิปจากไดอะแมกเน็ตที่แรงเพียงพอแทนแม่เหล็กที่มีขั้วตรงข้ามกับวงแหวนค้ำยันแม่เหล็ก เหล่านั้น. เปลี่ยนมัดวงจรแม่เหล็กแม่เหล็ก + ทรงกรวย เพียงแค่มีกรวยไดอะแมกเนติก การตรึงบนแกนจะเชื่อถือได้มากขึ้น แต่ไดอะแมกเน็ตไม่แตกต่างกันในการโต้ตอบที่รุนแรงและความเข้มของสนามสูงและจำเป็นต้องมี "ปริมาตร" ขนาดใหญ่ของฟิลด์นี้เพื่อนำไปใช้อย่างน้อยอย่างใด เนื่องจากสนามมีความสม่ำเสมอในแนวแกนเมื่อเทียบกับแกนของการหมุน จึงไม่มีการเปลี่ยนแปลงในสนามแม่เหล็กระหว่างการหมุน กล่าวคือ แบริ่งดังกล่าวไม่สร้างความต้านทานต่อการหมุน
ตามหลักเหตุผล หลักการดังกล่าวควรนำไปใช้กับสารแขวนลอยในพลาสมา - "ขวดแม่เหล็ก" ที่ปะติดปะต่อไว้ (คอร์กตรอน) เราจะรอดูอะไร
ทำไมฉันถึงมั่นใจในผลลัพธ์? เพราะมันเป็นไปไม่ได้ แต่มีอยู่จริง :) สิ่งเดียวที่อาจต้องทำเป็นวงจรแม่เหล็กในรูปกรวยและถ้วยสำหรับการกำหนดค่าสนาม "แข็ง" มากขึ้น
คุณยังสามารถค้นหาวิดีโอที่มีการระงับที่คล้ายกันได้:
ที่นี่ผู้เขียนไม่ได้ใช้วงจรแม่เหล็กใด ๆ และใช้การเน้นที่เข็มตามความจำเป็นโดยทั่วไปเพื่อทำความเข้าใจทฤษฎีบทของเอิร์นชอว์ แต่ท้ายที่สุดแล้ว วงแหวนต่างๆ ก็ได้รับการแก้ไขอย่างแน่นหนาบนแกนแล้ว ซึ่งหมายความว่าคุณสามารถกระจายแกนระหว่างวงแหวนได้ ซึ่งทำได้อย่างง่ายดายโดยใช้แกนแม่เหล็กรูปกรวยบนแม่เหล็กบนแกน เหล่านั้น. จนกว่า "ก้น" ของ "แก้วแม่เหล็ก" จะถูกเจาะ การผลักวงจรแม่เหล็กเข้าไปในวงแหวนยิ่งยากขึ้นเรื่อยๆ การซึมผ่านของแม่เหล็กของอากาศน้อยกว่าวงจรแม่เหล็ก - ลดลง ช่องว่างอากาศจะเพิ่มความแรงของสนาม เหล่านั้น. กลไกหนึ่งแกนได้รับการแก้ไขอย่างแน่นหนา - จากนั้นไม่จำเป็นต้องใช้การรองรับบนเข็ม เหล่านั้น. เห็นภาพแรกสุด
ป.ล.
นี่คือสิ่งที่ฉันพบ จากซีรีส์หัวไม่ดีไม่ยอมกลับใจ - ผู้เขียนยังคงเป็น Biletsky - แม่อย่าร้องไห้ที่นั่น - การกำหนดค่าของสนามค่อนข้างซับซ้อนยิ่งกว่านั้นแกนหมุนไม่สม่ำเสมอเช่น ระหว่างการหมุนจะมีการเปลี่ยนแปลงการเหนี่ยวนำแม่เหล็กในแกนโดยที่ยื่นออกมาทั้งหมด ... ให้ความสนใจกับลูกบอลในแม่เหล็กวงแหวนในทางกลับกันทรงกระบอกในแม่เหล็กวงแหวน เหล่านั้น. ผู้ชายทำผิดหลักการระงับที่อธิบายไว้ที่นี่อย่างโง่เขลา
ดีหรือบัดกรีช่วงล่างในภาพถ่ายเช่น พริกในภาพใช้ประคองบนเข็ม และเขาแขวนลูกบอลไว้แทนเข็ม - โอ้ ชัยฏอน - มันได้ผล - ใครจะไปคิด (ฉันจำได้ว่าพวกเขาพิสูจน์ให้ฉันเห็นว่าฉันไม่เข้าใจทฤษฎีบทของเอิร์นชอว์อย่างถูกต้อง) แต่เห็นได้ชัดว่ามันไม่บ้าที่จะแขวนลูกบอลสองลูกและใช้แหวนเพียงสองวงก็พอ เหล่านั้น. จำนวนแม่เหล็กในอุปกรณ์ในวิดีโอสามารถลดลงเหลือ 4 อย่างง่ายดาย และอาจมากถึง 3 เช่น การกำหนดค่าที่มีรูปทรงกระบอกในวงแหวนหนึ่งและอีกอันหนึ่งถือได้ว่าได้รับการพิสูจน์โดยการทดลองว่าใช้งานได้ ดูรูปวาดของแนวคิดดั้งเดิม ที่นั่นฉันใช้จุดหยุดสมมาตรสองจุดและทรงกระบอก + กรวย แม้ว่าฉันคิดว่ากรวยที่เป็นส่วนหนึ่งของทรงกลมตั้งแต่เสาถึงเส้นผ่านศูนย์กลางทำงานเหมือนกัน
ดังนั้น ตัวเน้นเองจึงเป็นแบบนี้ - นี่คือวงจรแม่เหล็ก (เช่น เหล็ก นิกเกิล ฯลฯ) มันเป็นเพียง
วางแหวนแม่เหล็ก ส่วนกลับเหมือนกัน แต่ในทางกลับกัน :) และหยุดสองจุดในแรงขับ - สหาย  Earnshaw ห้ามไม่ให้ทำงานในที่เดียว
Earnshaw ห้ามไม่ให้ทำงานในที่เดียว
ความสนใจ!!!
คุณได้ปิดการใช้งาน JavaScript และคุกกี้!
คุณต้องเปิดใช้งานเพื่อให้ไซต์ทำงานได้อย่างถูกต้อง!
ตลับลูกปืนแม่เหล็กแบบแอคทีฟ
ตลับลูกปืนแม่เหล็กแบบแอคทีฟ (AMP)
(ผลิตโดย S2M Société de Mécanique Magnétique SA, 2, rue des Champs, F-27950 St.Marcel ประเทศฝรั่งเศส)
|
|
การใช้งานหลักของตลับลูกปืนแม่เหล็กแบบแอคทีฟนั้นเป็นส่วนหนึ่งของเครื่องจักรเทอร์โบ แนวคิดที่ปราศจากน้ำมันในคอมเพรสเซอร์และตัวขยายเทอร์โบช่วยให้บรรลุผล ความน่าเชื่อถือสูงสุดเนื่องจากไม่มีการสึกหรอของส่วนประกอบเครื่อง ตลับลูกปืนแม่เหล็กแบบแอคทีฟ (AMP) มีการใช้กันอย่างแพร่หลายในหลายอุตสาหกรรม ตลับลูกปืนแม่เหล็กแอคทีฟแบบไม่สัมผัสถูกนำมาใช้เพื่อปรับปรุงประสิทธิภาพไดนามิก เพิ่มความน่าเชื่อถือและประสิทธิภาพ |
|
หลักการทำงานของตลับลูกปืนแม่เหล็กขึ้นอยู่กับผลของการลอยตัวในสนามแม่เหล็ก เพลาในตลับลูกปืนดังกล่าวแขวนอยู่ในสนามแม่เหล็กอันทรงพลังอย่างแท้จริง ระบบเซ็นเซอร์จะตรวจสอบตำแหน่งของเพลาอย่างต่อเนื่อง และส่งสัญญาณไปยังแม่เหล็กตำแหน่งสเตเตอร์ เพื่อแก้ไขแรงดึงดูดจากด้านใดด้านหนึ่ง |
|


1 . คำอธิบายทั่วไประบบแอมป์
ระบบกันสะเทือนแบบแอคทีฟแม่เหล็กประกอบด้วย 2 ส่วนแยกกัน:
การแบก;
ระบบควบคุมอิเล็กทรอนิกส์
ระบบกันสะเทือนแบบแม่เหล็กประกอบด้วยแม่เหล็กไฟฟ้า (คอยล์กำลัง 1 และ 3) ที่ดึงดูดโรเตอร์ (2)

ส่วนประกอบ AMP
1. แบริ่งเรเดียล
โรเตอร์แบริ่งเรเดียลซึ่งติดตั้งเพลตเฟอร์โรแมกเนติกนั้นยึดไว้โดยสนามแม่เหล็กที่เกิดจากแม่เหล็กไฟฟ้าที่อยู่บนสเตเตอร์

โรเตอร์ถูกถ่ายโอนไปยังสถานะแขวนลอยตรงกลาง ไม่ได้สัมผัสกับสเตเตอร์ ตำแหน่งของโรเตอร์ถูกควบคุมโดยเซ็นเซอร์อุปนัย พวกเขาตรวจจับการเบี่ยงเบนจากตำแหน่งที่ระบุและให้สัญญาณที่ควบคุมกระแสในแม่เหล็กไฟฟ้าเพื่อให้โรเตอร์กลับสู่ตำแหน่งปกติ
คอยล์ 4 ตัววางตามแนวแกนวี และ ว และออฟเซ็ตที่มุม 45 องศาจากแกน X และ Y ถือโรเตอร์ไว้ตรงกลางสเตเตอร์ ไม่มีการสัมผัสระหว่างโรเตอร์และสเตเตอร์ การกวาดล้างรัศมี 0.5-1 มม. ระยะห่างแนวแกน 0.6-1.8 มม.
2. แบริ่งแรงขับ
ตลับลูกปืนกันรุนทำงานในลักษณะเดียวกัน แม่เหล็กไฟฟ้าในรูปของวงแหวนแบบถอดไม่ได้จะอยู่ที่ทั้งสองด้านของแผ่นกันแรงขับซึ่งติดตั้งอยู่บนเพลา แม่เหล็กไฟฟ้าได้รับการแก้ไขบนสเตเตอร์ ดิสก์แรงขับถูกผลักไปที่โรเตอร์ (เช่น หดพอดี) ตัวเข้ารหัสตามแนวแกนมักจะอยู่ที่ปลายเพลา


3. ตัวช่วย (ความปลอดภัย)
แบริ่ง
แบริ่งเสริมใช้เพื่อรองรับโรเตอร์เมื่อเครื่องหยุดทำงานและในกรณีที่ระบบควบคุม AMP ล้มเหลว ภายใต้สภาวะการทำงานปกติ ตลับลูกปืนเหล่านี้จะยังคงอยู่กับที่ ระยะห่างระหว่างแบริ่งเสริมและโรเตอร์มักจะเป็นครึ่งหนึ่งของช่องว่างอากาศ อย่างไรก็ตาม หากจำเป็น สามารถลดขนาดลงได้ ตลับลูกปืนเสริมส่วนใหญ่เป็นตลับลูกปืนแบบหล่อลื่นที่เป็นของแข็ง แต่สามารถใช้ตลับลูกปืนประเภทอื่นๆ เช่น ตลับลูกปืนธรรมดาได้
4. ระบบควบคุมอิเล็กทรอนิกส์

ระบบควบคุมอิเล็กทรอนิกส์ควบคุมตำแหน่งของโรเตอร์โดยมอดูเลตกระแสที่ไหลผ่านแม่เหล็กไฟฟ้าขึ้นอยู่กับค่าสัญญาณของเซ็นเซอร์ตำแหน่ง
5. ระบบประมวลผลอิเล็กทรอนิกส์ สัญญาณ
สัญญาณที่ส่งโดยตัวเข้ารหัสจะถูกเปรียบเทียบกับสัญญาณอ้างอิงที่สอดคล้องกับตำแหน่งระบุของโรเตอร์ ถ้าสัญญาณอ้างอิง ศูนย์ตำแหน่งเล็กน้อยสอดคล้องกับศูนย์กลางของสเตเตอร์ เมื่อเปลี่ยนสัญญาณอ้างอิง เป็นไปได้ที่จะย้ายตำแหน่งเล็กน้อยโดยครึ่งหนึ่งของช่องว่างอากาศ สัญญาณการโก่งตัวเป็นสัดส่วนกับความแตกต่างระหว่างตำแหน่งระบุและตำแหน่งของโรเตอร์ใน ช่วงเวลานี้. สัญญาณนี้ถูกส่งไปยังโปรเซสเซอร์ซึ่งจะส่งสัญญาณแก้ไขไปยังเพาเวอร์แอมป์
อัตราส่วนของสัญญาณเอาท์พุตต่อสัญญาณเบี่ยงเบนถูกกำหนดโดยฟังก์ชันการถ่ายโอน ฟังก์ชันการถ่ายโอนได้รับเลือกเพื่อรักษาโรเตอร์ด้วยความแม่นยำสูงสุดในตำแหน่งที่กำหนด และเพื่อกลับไปยังตำแหน่งนี้อย่างรวดเร็วและราบรื่นในกรณีที่มีการรบกวน ฟังก์ชันถ่ายโอนจะกำหนดความแข็งและการหน่วงของระบบกันสะเทือนแบบแม่เหล็ก
6. เพาเวอร์แอมป์
อุปกรณ์นี้ส่งแม่เหล็กไฟฟ้าแบริ่งที่มีกระแสที่จำเป็นในการสร้างสนามแม่เหล็กที่กระทำต่อโรเตอร์ กำลังของเครื่องขยายเสียงขึ้นอยู่กับความแรงสูงสุดของแม่เหล็กไฟฟ้า ช่องว่างอากาศ และเวลาตอบสนองของระบบควบคุมอัตโนมัติ (กล่าวคือ ความเร็วที่จะต้องเปลี่ยนแรงนี้เมื่อเผชิญกับสิ่งกีดขวาง) ขนาดทางกายภาพของระบบอิเล็กทรอนิกส์ไม่เกี่ยวข้องโดยตรงกับน้ำหนักของโรเตอร์ของเครื่อง แต่มักเกี่ยวข้องกับอัตราส่วนของตัวบ่งชี้ระหว่างปริมาณการรบกวนและน้ำหนักของโรเตอร์ ดังนั้นเปลือกขนาดเล็กจะเพียงพอสำหรับกลไกขนาดใหญ่ที่ติดตั้งโรเตอร์ที่ค่อนข้างหนักซึ่งมีการรบกวนเพียงเล็กน้อย ในขณะเดียวกัน เครื่องจักรที่มีสัญญาณรบกวนมากกว่าจะต้องติดตั้งตู้ไฟฟ้าขนาดใหญ่ขึ้น
2. ลักษณะบางประการของ AMP
ช่องว่างอากาศ
ช่องว่างอากาศคือช่องว่างระหว่างโรเตอร์กับสเตเตอร์ จำนวนการกวาดล้างที่ระบุ อี, ขึ้นอยู่กับเส้นผ่านศูนย์กลาง
ตามกฎทั่วไปจะใช้ค่าต่อไปนี้:
|
ง (มม.) |
อี(มม.) |
|
< 100 |
0,3 - 0,6 |
|
100 - 1 000 |
0,6 - 1,0 |
ความเร็วในการหมุน
ความเร็วในการหมุนสูงสุดของตลับลูกปืนแม่เหล็กเรเดียลขึ้นอยู่กับลักษณะของเพลตโรเตอร์แม่เหล็กไฟฟ้า กล่าวคือ ความต้านทานของเพลตต่อแรงเหวี่ยงหนีศูนย์กลาง ด้วยเม็ดมีดมาตรฐาน สามารถทำความเร็วรอบวงได้ถึง 200 ม./วินาที ความเร็วของการหมุนของตลับลูกปืนแม่เหล็กตามแนวแกนถูกจำกัดโดยความต้านทานของเหล็กหล่อของจานผลัก สามารถทำความเร็วรอบข้างได้ 350 ม./วินาที โดยใช้อุปกรณ์มาตรฐาน
ภาระของ AMB ขึ้นอยู่กับวัสดุที่เป็นเฟอร์โรแมกเนติกที่ใช้ เส้นผ่านศูนย์กลางของโรเตอร์ และความยาวตามยาวของสเตเตอร์กันสะเทือน ขีดสุด ภาระจำเพาะ AMP ที่ทำจากวัสดุมาตรฐานคือ 0.9 N/cm² โหลดสูงสุดนี้ต่ำกว่าค่าที่สอดคล้องกันของตลับลูกปืนแบบคลาสสิก อย่างไรก็ตาม ความเร็วรอบนอกที่สูงช่วยให้เส้นผ่านศูนย์กลางของเพลาเพิ่มขึ้นเพื่อให้ได้ค่าสูงสุด พื้นผิวขนาดใหญ่หน้าสัมผัสจึงจำกัดการรับน้ำหนักเท่ากับตลับลูกปืนแบบคลาสสิกโดยไม่จำเป็นต้องเพิ่มความยาว
การใช้พลังงาน
ตลับลูกปืนแม่เหล็กแบบแอคทีฟใช้พลังงานต่ำมาก การใช้พลังงานนี้มาจากการสูญเสียฮิสเทรีซิส กระแสน้ำวน (กระแสฟูโกต์) ในตลับลูกปืน (กำลังที่ใช้กับเพลา) และการสูญเสียความร้อนในเปลือกอิเล็กทรอนิกส์ AMP ใช้พลังงานน้อยกว่าแบบคลาสสิก 10-100 เท่าสำหรับกลไกที่มีขนาดใกล้เคียงกัน การใช้พลังงานของระบบควบคุมอิเล็กทรอนิกส์ที่ต้องใช้ แหล่งภายนอกกระแสยังต่ำมาก แบตเตอรี่ถูกใช้เพื่อรักษา gimbal ในกรณีที่ไฟดับ - ในกรณีนี้จะเปิดโดยอัตโนมัติ
สภาพแวดล้อม
สามารถติดตั้ง AMB ได้โดยตรงในสภาพแวดล้อมการทำงาน โดยไม่จำเป็นต้องใช้คัปปลิ้งและอุปกรณ์ที่เหมาะสม รวมถึงสิ่งกีดขวางสำหรับฉนวนกันความร้อน ทุกวันนี้ ตลับลูกปืนแม่เหล็กแบบแอคทีฟทำงานในหลากหลายสภาวะ: สุญญากาศ อากาศ ฮีเลียม ไฮโดรคาร์บอน ออกซิเจน น้ำทะเลและยูเรเนียมเฮกซาฟลูออไรด์ รวมทั้งที่อุณหภูมิตั้งแต่ - 253° C ถึง + 450 ° จาก.
3. ข้อดีของตลับลูกปืนแม่เหล็ก
- ไม่สัมผัส / ปราศจากของเหลว
- ไม่มีแรงเสียดทานทางกล
- ขาดน้ำมัน
- เพิ่มความเร็วรอบข้าง - ปรับปรุงความน่าเชื่อถือ
- ความน่าเชื่อถือในการทำงานของตู้ควบคุม > 52,000 h.
- ความน่าเชื่อถือในการทำงานของตลับลูกปืน EM > 200,000 ชม.
- ขาดเรียนเกือบหมด บำรุงรักษาเชิงป้องกัน - ขนาดเครื่องเทอร์โบที่เล็กลง
- ไม่มีระบบหล่อลื่น
- ขนาดที่เล็กกว่า (P = K*L*D²*N)
- น้ำหนักน้อย - การตรวจสอบ
- ภาระแบริ่ง
- โหลดเครื่องเทอร์โบ - พารามิเตอร์ที่ปรับได้
- ระบบควบคุมแบริ่งแม่เหล็กแบบแอคทีฟ
- ความแข็ง (แตกต่างกันไปขึ้นอยู่กับไดนามิกของโรเตอร์)
- การหน่วง (แตกต่างกันไปขึ้นอยู่กับไดนามิกของโรเตอร์) - การทำงานโดยไม่ใช้ซีล (คอมเพรสเซอร์และตัวขับในเรือนเดียว)
- แบริ่งในกระบวนการแก๊ส
- ช่วงอุณหภูมิการทำงานกว้าง
- การเพิ่มประสิทธิภาพของไดนามิกของโรเตอร์เนื่องจากการสั้นลง
ข้อได้เปรียบที่ไม่อาจโต้แย้งได้ของตลับลูกปืนแม่เหล็กคือการไม่มีพื้นผิวที่เสียดสี ส่งผลให้การสึกหรอ การเสียดสี และที่สำคัญที่สุดคือ การไม่มี พื้นที่ทำงานอนุภาคที่เกิดขึ้นระหว่างการทำงานของตลับลูกปืนทั่วไป
ตลับลูกปืนแม่เหล็กแบบแอกทีฟมีความสามารถในการรับน้ำหนักสูงและ ความแข็งแรงทางกล. สามารถใช้ได้ที่ความเร็วรอบสูง เช่นเดียวกับในสุญญากาศและที่อุณหภูมิต่างๆ
วัสดุที่จัดทำโดย S2M ประเทศฝรั่งเศส ( www.s2m.fr)
ตลับลูกปืนแม่เหล็ก เช่นเดียวกับกลไกที่เหลือของกลุ่มตลับลูกปืน ทำหน้าที่รองรับเพลาหมุนแต่ต่างจากตลับลูกปืนธรรมดาและตลับลูกปืนทั่วไป การเชื่อมต่อกับเพลานั้นไม่มีการสัมผัสทางกลไก กล่าวคือ ใช้หลักการลอยตัว
การจำแนกประเภทและหลักการทำงาน
ด้วยการใช้หลักการลอยตัว เพลาหมุนจะพุ่งทะยานในสนามแม่เหล็กอันทรงพลังอย่างแท้จริง เพื่อควบคุมการเคลื่อนที่ของเพลาและประสานการทำงานของการติดตั้งแม่เหล็กช่วยให้ ระบบที่ซับซ้อนเซ็นเซอร์ซึ่งตรวจสอบสถานะของระบบอย่างต่อเนื่องและให้สัญญาณควบคุมที่จำเป็นเปลี่ยนแรงดึงดูดจากด้านใดด้านหนึ่ง
แบริ่งแม่เหล็กแบ่งออกเป็นสอง กลุ่มใหญ่- แอคทีฟและพาสซีฟ รายละเอียดเพิ่มเติมเกี่ยวกับอุปกรณ์ของตลับลูกปืนแต่ละประเภทด้านล่าง
- ตลับลูกปืนแม่เหล็กแบบแอคทีฟ

1, 3 - คอยล์ไฟ; 2 - เพลา แยกแยะระหว่างกลไกแนวรัศมีและแรงขับ (ตามประเภทของภาระที่รับรู้) แต่หลักการทำงานเหมือนกัน ใช้โรเตอร์พิเศษ (เพลาปกติจะไม่ทำงาน) ดัดแปลงด้วยบล็อกเฟอร์โรแมกเนติก โรเตอร์นี้ "ค้าง" ในสนามแม่เหล็กที่สร้างขึ้นโดยขดลวดแม่เหล็กไฟฟ้าที่อยู่บนสเตเตอร์ นั่นคือ รอบเพลา 360 องศา ทำให้เกิดวงแหวน
ช่องว่างอากาศเกิดขึ้นระหว่างโรเตอร์และสเตเตอร์ ซึ่งช่วยให้ชิ้นส่วนหมุนได้โดยมีแรงเสียดทานน้อยที่สุด

กลไกที่แสดงภาพถูกควบคุมโดยระบบอิเล็กทรอนิกส์พิเศษซึ่งใช้เซ็นเซอร์ตรวจสอบตำแหน่งของโรเตอร์ที่สัมพันธ์กับคอยล์อย่างต่อเนื่องและให้กระแสควบคุมไปยังคอยล์ที่เกี่ยวข้องในเวลาที่น้อยที่สุด ซึ่งช่วยให้โรเตอร์อยู่ในตำแหน่งเดียวกันได้

การคำนวณระบบดังกล่าวสามารถศึกษารายละเอียดเพิ่มเติมได้ในเอกสารแนบ
- ตลับลูกปืนแม่เหล็กแบบพาสซีฟ

โรเตอร์ติดตั้งแม่เหล็กถาวรในลักษณะเดียวกับสเตเตอร์ ซึ่งอยู่ในวงแหวนรอบโรเตอร์ เสาที่มีชื่อเดียวกันจะตั้งอยู่เคียงข้างกันในแนวรัศมี ซึ่งสร้างผลกระทบจากการลอยตัวของเพลา ระบบดังกล่าวสามารถประกอบได้ด้วยมือ
ข้อดี
แน่นอน ข้อได้เปรียบหลักคือการไม่มีปฏิสัมพันธ์ทางกลระหว่างโรเตอร์หมุนและสเตเตอร์ (วงแหวน)จากนี้ไปตลับลูกปืนดังกล่าวมีความทนทานมากนั่นคือมีความต้านทานการสึกหรอเพิ่มขึ้น นอกจากนี้การออกแบบกลไกยังช่วยให้สามารถใช้งานได้ในสภาพแวดล้อมที่ก้าวร้าว - อุณหภูมิสูง / ต่ำ, ก้าวร้าว สิ่งแวดล้อมอากาศ. ดังนั้น MFs จึงถูกใช้ในอุตสาหกรรมอวกาศมากขึ้น
ข้อเสีย
ขออภัย ระบบมี จำนวนมากข้อบกพร่อง ซึ่งรวมถึง:- ความยากลำบากในการควบคุมสารแขวนลอยที่ใช้งานอยู่ จำเป็นต้องมีระบบควบคุมกิมบอลอิเล็กทรอนิกส์ที่ซับซ้อนและมีราคาแพง การใช้งานสามารถพิสูจน์ได้เฉพาะในอุตสาหกรรมที่ "แพง" - อวกาศและการทหาร
- จำเป็นต้องใช้ตลับลูกปืนนิรภัย ไฟฟ้าดับกะทันหันหรือความล้มเหลวของขดลวดแม่เหล็กสามารถนำไปสู่ผลร้ายแรงสำหรับระบบกลไกทั้งหมด ดังนั้นสำหรับการประกันภัยร่วมกับตลับลูกปืนแม่เหล็กจึงใช้ตลับลูกปืนเชิงกล ในกรณีที่อุปกรณ์หลักล้มเหลวพวกเขาจะสามารถรับภาระและหลีกเลี่ยงความเสียหายร้ายแรง
- เครื่องทำความร้อนขดลวดขดลวด เนื่องจากกระแสที่ไหลผ่านทำให้เกิดสนามแม่เหล็ก ขดลวดจึงร้อนขึ้น ซึ่งมักเป็นปัจจัยที่ไม่เอื้ออำนวย ดังนั้นจึงจำเป็นต้องใช้หน่วยทำความเย็นแบบพิเศษ ซึ่งจะเพิ่มค่าใช้จ่ายในการใช้ gimbal ต่อไป
พื้นที่ใช้งาน
ความสามารถในการทำงานที่อุณหภูมิใดๆ ในสุญญากาศ และการขาดการหล่อลื่น ช่วยให้สามารถใช้ระบบกันสะเทือนในอุตสาหกรรมอวกาศ ในเครื่องจักรอุตสาหกรรมการกลั่นน้ำมัน พวกเขายังพบการประยุกต์ใช้ในเครื่องหมุนเหวี่ยงแก๊สสำหรับการเสริมสมรรถนะยูเรเนียม โรงไฟฟ้าหลายแห่งยังใช้แม็กเลฟในชุดเครื่องกำเนิดไฟฟ้าอีกด้วย
ด้านล่างนี้คือบางส่วน วิดีโอที่น่าสนใจในหัวข้อนี้