เครื่องมือที่ใช้เป็นตัวอย่างและอุปกรณ์เพิ่มเติม
เซ็นเซอร์สัมผัสสำหรับ Arduino
โมดูลเป็นปุ่มสัมผัสสัญญาณดิจิตอลจะถูกสร้างขึ้นที่เอาต์พุตซึ่งแรงดันไฟฟ้านั้นสอดคล้องกับระดับของตรรกะและศูนย์ หมายถึงเซ็นเซอร์สัมผัสแบบ capacitive เราพบอุปกรณ์อินพุตดังกล่าวเมื่อทำงานกับการแสดงผลของแท็บเล็ต, iPhone หรือจอภาพแบบสัมผัส หากบนจอภาพเรากดไอคอนด้วยสไตลัสหรือนิ้วสำหรับสิ่งนี้เราใช้พื้นที่ของบอร์ดที่มีขนาดของไอคอน Windows ซึ่งถูกสัมผัสด้วยนิ้วเท่านั้นไม่รวมสไตลัส พื้นฐานของโมดูลคือชิป TTP223-BA6 มีไฟแสดงสถานะเพาเวอร์
การควบคุมจังหวะการเล่นเมโลดี้
เมื่อติดตั้งในอุปกรณ์จะครอบคลุมพื้นที่สัมผัสของพื้นผิวบอร์ดโมดูล ชั้นบางไฟเบอร์กลาส พลาสติก แก้ว หรือไม้ ข้อดีของปุ่มสัมผัสแบบ capacitive ได้แก่ อายุการใช้งานที่ยาวนานและความเป็นไปได้ในการปิดผนึกแผงด้านหน้าของอุปกรณ์ คุณสมบัติป้องกันการก่อกวน ซึ่งช่วยให้สามารถใช้เซ็นเซอร์สัมผัสในเครื่องใช้ภายนอกอาคารเมื่อสัมผัสหยดน้ำโดยตรง ตัวอย่างเช่น ปุ่มกริ่งประตูหรือ เครื่องใช้ไฟฟ้า. แอปพลิเคชั่นที่น่าสนใจในอุปกรณ์ สมาร์ทเฮาส์- เปลี่ยนสวิตช์ไฟ
ลักษณะเฉพาะ
แรงดันไฟจ่าย 2.5 - 5.5 V
สัมผัสเวลาตอบสนองในโหมดการบริโภคในปัจจุบันต่างๆ
ต่ำ 220 ms
ปกติ 60 ms
สัญญาณเอาท์พุต
แรงดันไฟฟ้า
บันทึกสูง ระดับ 0.8 X แรงดันไฟจ่าย
บันทึกต่ำ ระดับ 0.3 X แรงดันไฟจ่าย
กระแสไฟที่ระดับการจ่ายและลอจิก 3 V, mA
ต่ำ8
สูง -4
ขนาดกระดาน 28 x 24 x 8 mm
ติดต่อและสัญญาณ
ไม่มีการสัมผัส - สัญญาณเอาต์พุตมีระดับลอจิกต่ำ สัมผัส - หน่วยลอจิคัลที่เอาต์พุตเซ็นเซอร์
ทำไมมันถึงได้ผลหรือทฤษฎีบางอย่าง
ร่างกายของมนุษย์ก็เหมือนกับทุกสิ่งที่อยู่รอบตัวเรา ลักษณะไฟฟ้า. เมื่อเซ็นเซอร์สัมผัสถูกกระตุ้น ความจุ ความต้านทาน ความเหนี่ยวนำของเราจะปรากฏขึ้น ที่ด้านล่างของบอร์ดโมดูลมีส่วนของฟอยล์ที่เชื่อมต่อกับอินพุตของไมโครเซอร์กิต ระหว่างนิ้วของผู้ปฏิบัติงานกับฟอยล์ที่ด้านล่างมีชั้นอิเล็กทริก - วัสดุของฐานพาหะของแผงวงจรพิมพ์โมดูล ในขณะที่สัมผัสกัน ร่างกายมนุษย์จะถูกชาร์จด้วยกระแสไฟฟ้าขนาดเล็กที่ไหลผ่านตัวเก็บประจุที่เกิดจากแผ่นฟอยล์และนิ้วของมนุษย์ ในมุมมองแบบง่าย กระแสจะไหลผ่านตัวเก็บประจุสองตัวที่เชื่อมต่อแบบอนุกรม: ฟอยล์ นิ้วหนึ่งที่อยู่บนพื้นผิวตรงข้ามของบอร์ด และร่างกายมนุษย์ ดังนั้นหากพื้นผิวของบอร์ดถูกปกคลุมด้วยฉนวนบาง ๆ สิ่งนี้จะนำไปสู่การเพิ่มขึ้นของความหนาของชั้นอิเล็กทริกของตัวเก็บประจุแบบฟอยล์และจะไม่รบกวนการทำงานของโมดูล
ไมโครเซอร์กิต TTP223-BA6 จับพัลส์กระแสไฟขนาดเล็กและลงทะเบียนการสัมผัส ด้วยคุณสมบัติของไมโครเซอร์กิต เทคโนโลยีนี้จึงไม่เป็นอันตรายต่อการทำงานกับกระแสดังกล่าว เมื่อเราสัมผัสกรณีของทีวีหรือจอภาพที่ใช้งานได้ กระแสไฟขนาดเล็กจะทะลุผ่านเรา
โหมดพลังงานต่ำ
หลังจากจ่ายไฟแล้ว เซ็นเซอร์สัมผัสจะอยู่ในโหมดพลังงานต่ำ หลังจากทริกเกอร์เป็นเวลา 12 วินาที โมดูลจะเข้าสู่โหมดปกติ หากไม่มีการติดต่อเพิ่มเติม โมดูลจะกลับสู่โหมดลดการใช้กระแสไฟ ความเร็วในการตอบสนองของโมดูลที่จะสัมผัสในโหมดต่างๆ ระบุไว้ในข้อกำหนดด้านบน
ทำงานกับ Arduino UNO
ดาวน์โหลดโปรแกรมต่อไปนี้ไปยัง Arduino UNO
#define ctsPin 2 // ติดต่อเพื่อต่อสายสัญญาณเซ็นเซอร์สัมผัส
int ledPin = 13; // ปักหมุดสำหรับ LED
การตั้งค่าเป็นโมฆะ() (
Serial.begin(9600);
โหมดพิน (ledPin, เอาต์พุต);
pinMode(ctsPin, INPUT);
}
วงเป็นโมฆะ () (
int ctsValue = digitalRead (ctsPin);
ถ้า (ctsValue == สูง)(
digitalWrite (ledPin, สูง);
Serial.println("สัมผัส");
}
อื่น(
digitalWrite (ledPin ต่ำ);
Serial.println("ไม่ได้สัมผัส");
}
ล่าช้า (500);
}
เชื่อมต่อเซ็นเซอร์สัมผัสและ Arduino UNO ตามที่แสดง วงจรสามารถเสริมด้วย LED ที่เปิดขึ้นเมื่อสัมผัสเซ็นเซอร์ โดยเชื่อมต่อผ่านตัวต้านทาน 430 โอห์มเพื่อพิน 13 ปุ่มสัมผัสมักติดตั้งตัวแสดงสถานะการสัมผัส ทำให้ผู้ปฏิบัติงานทำงานได้ง่ายขึ้น เมื่อกดปุ่มแบบกลไก เราจะรู้สึกถึงการคลิกโดยไม่คำนึงถึงปฏิกิริยาของระบบ ความแปลกใหม่ของเทคโนโลยีนี้ค่อนข้างน่าแปลกใจเล็กน้อยเนื่องจากทักษะยนต์ของเราที่พัฒนาขึ้นตลอดหลายปีที่ผ่านมา ตัวบ่งชี้ความดันช่วยเราให้พ้นจากความรู้สึกแปลกใหม่

วงจรที่เสนอให้ทำซ้ำคือเครื่องขยายเสียงที่มีความไวสูงต่อสนามแม่เหล็กไฟฟ้าที่สร้างขึ้นโดย อุปกรณ์ภายนอก. เมื่อหน้าสัมผัสอินพุทของวงจรเชื่อมต่อกับเสาอากาศ ไฟ LED จะส่งสัญญาณว่ามีรังสีสนามแม่เหล็กไฟฟ้าและการรบกวนจากอุปกรณ์ไฟฟ้า ไฟ LED ยังระบุถึงความเป็นจริงของการสัมผัสหน้าสัมผัสเนื่องจากร่างกายมนุษย์ดำเนินการบทบาทของเสาอากาศในกรณีนี้ ดังนั้นชื่อ - เซ็นเซอร์สัมผัส อีกชื่อหนึ่งของวงจรคือเสาอากาศแบบแอ็คทีฟ
แผนภูมิวงจรรวมเซ็นเซอร์สัมผัสแสดงในรูปที่ 1
วงจรคล้ายกับออสซิลเลเตอร์บน ทรานซิสเตอร์ np-nโครงสร้าง ขั้วต่อหนึ่งของขดลวด L1 เชื่อมต่อโดยตรงกับหน้าสัมผัสอินพุต X1 ขั้วของ LED VD1 ไม่สำคัญ ตัวต้านทาน R2 จำกัดกระแสผ่าน LED และด้วยเหตุนี้จึงกำหนดความสว่างของการเรืองแสงเมื่อเซ็นเซอร์ถูกกระตุ้น
เซ็นเซอร์สัมผัสถูกประกอบบน เขียงหั่นขนมขนาด 40 × 40 มม. รูปร่างโครงสร้างแสดงในรูปที่ 2
 |
|
| รูปที่ 2 | ลักษณะของเซ็นเซอร์สัมผัส |
ขดลวด L1 และ L2 อยู่บนโครงทั่วไปที่มีสองส่วนสำหรับการไขลานและแกนเฟอร์ไรท์ที่ปรับจูน เส้นผ่านศูนย์กลางภายนอกเฟรม - 10 มม. ความยาวแกน - 23 มม. เส้นผ่านศูนย์กลางเกลียวที่ฐานของแกน - 6 มม. ในการออกแบบที่แสดงในรูปที่ 2 L1 ถูกพันที่ส่วนบน L2 ที่ด้านล่าง แต่ละม้วนมีลวด PEL 0.2 จำนวน 100 รอบ ขดลวดรวมตาม. ใช้ไขควงขันแกนเข้ากับเฟรม VD1 LED - รุ่นใดก็ได้ในซีรีส์ AL307 ในฐานะ X1 จะใช้กลีบพื้น การสัมผัสจะทำให้ไฟ LED สว่างขึ้น
VD1 สามารถเชื่อมต่อแบบขนานได้ เครื่องมือวัดตัวอย่างเช่น มัลติมิเตอร์ในโหมดการวัดแรงดันไฟฟ้า ซึ่งจะช่วยให้คุณประเมินระดับความแรงของสนาม ในกรณีนี้ เสาอากาศภายนอกอาจเป็นชิ้นส่วนของลวดยึดที่ยาวหลายเซนติเมตร การตั้งค่าวงจรจะขึ้นอยู่กับการเลือกความยาวของเสาอากาศและการหาตำแหน่งของแกนกลางที่แรงดันไฟฟ้าบน LED มีค่าสูงสุด
โครงร่างไม่จู้จี้จุกจิกเกี่ยวกับการเลือกฐานองค์ประกอบ ตัวอย่างเช่นในวงจรรุ่นดั้งเดิมใช้ทรานซิสเตอร์ KT815G ความต้านทานของตัวต้านทาน R1 คือ 100 kOhm L1 และ L2 ใช้ขดลวดสองขดลวดบนแกนเฟอร์ไรต์แบบแท่งของเสาอากาศแม่เหล็กคลื่นยาวจากเครื่องรับวิทยุ ขดลวดสามารถเคลื่อนไปตามแกนกลางได้ เมื่อเคลื่อนที่ขดลวดจะสังเกตเห็นปรากฏการณ์ที่ไม่ขัดแย้งกับกฎของการเหนี่ยวนำแม่เหล็กไฟฟ้าซึ่งตรงกันข้ามกับรูปแบบที่เสนอ ด้วยระยะห่างที่สำคัญของขดลวดจากกันและกันและไม่มีแกนเฟอร์ไรต์ วงจรจึงหยุดทำงาน
วงจรนี้สามารถค้นหาการใช้งานจริงได้ไม่เพียงแค่ในการออกแบบเครื่องวัดความแรงของสนามเท่านั้น แต่ยังรวมถึงในระบบอัตโนมัติและอุปกรณ์ส่งสัญญาณด้วย เซ็นเซอร์สัมผัสสามารถเชื่อมต่อกับไมโครคอนโทรลเลอร์ได้ ในการดำเนินการนี้ ให้ทำการแปลงแรงดันไฟฟ้าแอนะล็อกเป็นดิจิทัลบน LED VD1 ซึ่งอาจใช้ทรัพยากรของไมโครคอนโทรลเลอร์เอง หากมี ADC ในตัว
โดยสรุปแล้ว ควรสังเกตว่ามีวงจรเซ็นเซอร์สัมผัสจำนวนมากที่ใช้ทรานซิสเตอร์แบบ field-effect และไม่มีองค์ประกอบอุปนัย บางทีงานของพวกเขาอาจมีประสิทธิภาพมากกว่าในหลาย ๆ กรณี แต่การออกแบบที่ให้ไว้ในบทความนี้เป็นตัวอย่างของต้นฉบับ วิธีแก้ปัญหาทางเทคนิคและมุ่งเป้าไปที่นักวิทยุสมัครเล่นมือใหม่
วรรณกรรม
- Brovin V. I. ปรากฏการณ์การถ่ายโอนพลังงานของการเหนี่ยวนำผ่านโมเมนต์แม่เหล็กของสารที่อยู่ในอวกาศโดยรอบและการประยุกต์ใช้ - M .: MetaSintez, 2546 - 20 น.
- Krylov K.S., Li Zhaeho, Kim Young Jin, Kim Seunghwan, Lee Sang-Ha. สิทธิบัตรการประดิษฐ์ เลขที่ 2395876 เสาอากาศแม่เหล็กแบบแอคทีฟพร้อมแกนเฟอร์ไรต์
เซ็นเซอร์วัดระยะและสัมผัส
เซ็นเซอร์อัลตราโซนิก
เซ็นเซอร์อัลตราโซนิกเป็นหนึ่งในสองเซ็นเซอร์ที่มาแทนที่การมองเห็นของหุ่นยนต์ เซ็นเซอร์อัลตราโซนิกช่วยให้หุ่นยนต์มองเห็นและตรวจจับวัตถุได้ นอกจากนี้ยังสามารถใช้เพื่อให้หุ่นยนต์หลีกเลี่ยงสิ่งกีดขวาง ประมาณการและวัดระยะทาง และจับการเคลื่อนไหวของวัตถุ
การอ่านค่าเซ็นเซอร์อัลตราโซนิกจะวัดเป็นเซนติเมตรและนิ้ว สามารถวัดระยะทางได้ตั้งแต่ 0 ถึง 255 เซนติเมตร โดยมีความแม่นยำ +/-3 ซม. เซ็นเซอร์อัลตราโซนิกทำงานบนหลักการเดียวกับเครื่องระบุตำแหน่ง ค้างคาว: วัดระยะทางโดยคำนวณเวลาที่คลื่นเสียงใช้ในการเดินทางกลับหลังกระดอนวัตถุ เช่น เสียงสะท้อน
กำหนดวัตถุขนาดใหญ่ที่มีพื้นผิวแข็งได้ดีที่สุด วัตถุจาก วัสดุที่อ่อนนุ่ม(ผ้า) หรือโค้งมน (ลูกบอล) เช่นเดียวกับบางเกินไป เล็ก ฯลฯ สามารถสร้างปัญหาให้กับเซ็นเซอร์ระหว่างการทำงานได้
ควรจำไว้ว่าเซ็นเซอร์อัลตราโซนิกสองตัวขึ้นไปที่ทำงานในห้องเดียวกันอาจรบกวนและลดความแม่นยำของผลลัพธ์
ตัวอย่างการใช้เซ็นเซอร์ระยะอัลตราโซนิก ได้แก่ การใช้งานในรถยนต์เพื่อส่งสัญญาณเตือนภัยไปยังผู้ขับขี่หรือควบคุมอัตโนมัติโดยสัญญาณจากเซ็นเซอร์ที่ระบุสถานการณ์อันตราย รวมกันเป็นการเชื่อมต่อเครือข่ายด้วยอินเทอร์เฟซระหว่างมนุษย์และเครื่องจักร (HMI)
รูปที่ 1
หลักการอัลตราโซนิกของการตรวจจับสิ่งกีดขวางขึ้นอยู่กับหลักการของเสียงสะท้อน ทรานสดิวเซอร์ประกอบด้วยทรานสดิวเซอร์สองตัว: ทรานสดิวเซอร์ตัวหนึ่งปล่อยคลื่นอัลตราโซนิก และคลื่นที่สะท้อนกลับจะถูกตรวจจับโดยทรานสดิวเซอร์อีกตัวหนึ่งหรือมากกว่า นอกจากนี้ยังสามารถใช้ทรานสดิวเซอร์เดียวกันกับที่ส่งคลื่นอัลตราโซนิกเพื่อตรวจจับคลื่นสะท้อน จุดประสงค์หลักของเซ็นเซอร์คือเพื่อตรวจจับว่ามีหรือไม่มีสิ่งกีดขวาง แต่หลักการนี้ (เวลาบิน) ยังช่วยให้เวลากลับมาของเสียงสะท้อนเมื่อ ความเร็วที่รู้จักการขยายเสียงเพื่อคำนวณระยะทางไปยังวัตถุ
อัลตราซาวนด์ไม่มีอะไรมากไปกว่าการสั่นสะเทือนที่ความถี่ > 20 kHz ทรานสดิวเซอร์ที่มีจำหน่ายทั่วไปส่วนใหญ่ทำงานที่ความถี่ในช่วง 40-250 kHz
การเปลี่ยนแปลงในพารามิเตอร์เสียงของเซ็นเซอร์ สิ่งแวดล้อมและ วัตถุประสงค์ต่างๆส่งผลอย่างมากต่อการทำงานของอุปกรณ์
ในทรานสดิวเซอร์อัลตราโซนิก ทรานสดิวเซอร์จะสร้างพัลส์สั้น ๆ ที่มุ่งเป้าไปที่เป้าหมายและย้อนกลับ
สิ่งสำคัญคือความเร็วของเสียงเป็นหน้าที่ขององค์ประกอบและอุณหภูมิของตัวกลาง (อากาศ) และส่งผลต่อความแม่นยำและความละเอียดของเซ็นเซอร์ ความแม่นยำของการวัดระยะทางเป็นสัดส่วนโดยตรงกับความแม่นยำของค่าความเร็วเสียงที่ใช้ในการคำนวณ และแตกต่างกันไปในสภาพจริงตั้งแต่ 345 m/s ที่ อุณหภูมิห้องสูงถึง 380 m/s ที่อุณหภูมิประมาณ 70 °C ความยาวคลื่นเสียง
เป็นฟังก์ชันของความเร็วของอัลตราซาวนด์ c และสัมพันธ์กับความถี่ ѓ ดังนั้นพารามิเตอร์เหล่านี้ (ความยาวคลื่นและความถี่) จึงส่งผลต่อความละเอียดและความแม่นยำด้วยเช่นกัน ขนาดขั้นต่ำเป้าหมายและช่วงระยะทางที่วัดโดยเซ็นเซอร์
การลดทอนเสียงเป็นหน้าที่ของความถี่และความชื้นซึ่งส่งผลต่อ ระยะทางสูงสุดตรวจพบโดยเซ็นเซอร์ คลื่นยาว (ที่มีความถี่ต่ำกว่า) มีลักษณะเฉพาะด้วยการลดทอนที่น้อยลง ที่ความถี่สูงกว่า 125 kHz การลดทอนสูงสุดจะเกิดขึ้นที่ความชื้นสัมพัทธ์ 100% ที่ความถี่ 40 kHz ซึ่งอยู่ที่ความชื้น 50% แล้ว เนื่องจากเซ็นเซอร์ต้องทำงานที่ค่าความชื้นทั้งหมด การลดทอนสูงสุดสำหรับแต่ละความถี่จึงถูกนำมาใช้ในการคำนวณ
เสียงพื้นหลังเป็นฟังก์ชันของความถี่และลดลงเมื่อความถี่เพิ่มขึ้น และยังส่งผลต่อระยะทางสูงสุดที่ตรวจจับได้และขนาดเป้าหมายขั้นต่ำอีกด้วย ความละเอียดและความถูกต้องบน ความถี่สูงสูงขึ้นในขณะที่ช่วงคลื่นสูงขึ้นด้วยความยาวคลื่นที่ยาวกว่า
เซ็นเซอร์สัมผัส
เซ็นเซอร์สัมผัสเป็นปุ่มที่สามารถมีได้สองสถานะ - กดและปล่อย โดยทางโปรแกรม เซ็นเซอร์จะรับรู้สถานะการสัมผัสอื่น
คุณสามารถเห็นปฏิกิริยาของเซ็นเซอร์สัมผัสบนหน้าจอแสดงผลในโหมดมุมมอง เมื่อไม่ได้กดปุ่มเซ็นเซอร์ 0 จะปรากฏขึ้นบนจอแสดงผล และเมื่อกด - 1
โดยการเพิ่มเซ็นเซอร์สัมผัสในการออกแบบหุ่นยนต์ (เช่น ในรูปแบบของกันชน) คุณสามารถทำให้หุ่นยนต์เปลี่ยนพฤติกรรมเมื่อเปิดใช้งานเซ็นเซอร์
เซ็นเซอร์สัมผัสเป็นหนึ่งในอวัยวะของการสัมผัสสำหรับหุ่นยนต์ ซึ่งทำให้จำเป็นเมื่อต้องการทำปฏิกิริยาของหุ่นยนต์กับวัตถุ
เซ็นเซอร์สัมผัสช่วยให้หุ่นยนต์สัมผัสได้
เซ็นเซอร์ความดันสามารถระบุช่วงเวลาที่มีการกดทับและช่วงเวลาที่ปล่อยออกมา
เซ็นเซอร์สัมผัสจะแสดงในรูปที่ 2
รูปที่ 2 เซ็นเซอร์สัมผัส
เครื่องมือที่ใช้เป็นตัวอย่างและ อุปกรณ์เสริม
ไมโครมิเตอร์
ในการวัดความเร็วรอบเดินเบาที่เซ็นเซอร์สัมผัส จำเป็นต้องใช้ไมโครมิเตอร์ (หรือตัวบ่งชี้การหมุน) ICH-25 ซึ่งจะวัดระยะทางที่เซ็นเซอร์ส่งผ่านจนกว่าจะมีการทริกเกอร์
ICH-25 ออกแบบมาเพื่อวัด มิติเชิงเส้นวิธีสัมบูรณ์และแบบสัมพัทธ์ การกำหนดขนาดของส่วนเบี่ยงเบนจากรูปทรงเรขาคณิตที่กำหนดและ ตำแหน่งสัมพัทธ์พื้นผิว
รูปที่ 3 แสดงตัวบ่งชี้หลายประเภท

รูปที่ 3
พารามิเตอร์ของไมโครมิเตอร์ ICH 25:
ช่วงการวัด 0-25 มม.
ค่าหาร 0.01 มม.
ขนาด 159x85x51 มม.
ผู้มีสิทธิเลือกตั้ง 2008 №7-8
การทำงานของเซ็นเซอร์สัมผัสแบบ capacitive ขึ้นอยู่กับความจุไฟฟ้าของร่างกายมนุษย์ ตัวอย่างเช่น เมื่อนำนิ้วเข้าใกล้เซ็นเซอร์ จะเป็นการสร้างความจุระหว่างเซ็นเซอร์กับพื้น ซึ่งอยู่ในช่วง 30 ... 100 pF สามารถใช้เอฟเฟกต์นี้กับเซ็นเซอร์ความใกล้ชิดและสวิตช์สัมผัส
เซ็นเซอร์สัมผัสแบบ capacitive มีข้อได้เปรียบที่ชัดเจนกว่าเซ็นเซอร์อื่นๆ (เช่น ถูกกระตุ้นโดยสัญญาณรบกวน 50/60 Hz หรือความต้านทานในการวัด) แต่จะใช้งานยากกว่า ผู้ผลิตชิปเช่น Microchip ได้สร้าง IC แบบกำหนดเองเพื่อจุดประสงค์นี้ในอดีต อย่างไรก็ตาม แม้กระทั่งตอนนี้ก็ยังสามารถสร้างเครื่องตรวจจับตัวเก็บประจุและ/หรือสวิตช์ที่เชื่อถือได้โดยใช้ส่วนประกอบมาตรฐานเพียงไม่กี่ชิ้น
ในวงจรนี้ เราตรวจพบการเปลี่ยนแปลงความกว้างพัลส์ของสัญญาณที่เกิดขึ้นเมื่อสัมผัสที่สัมผัส ในรูปที่ 1 โหนดต่อไปนี้สามารถพิจารณาได้ (จากซ้ายไปขวา):
ข้าว. 1. IC1 - 561TL1
เครื่องกำเนิดพัลส์รูปสี่เหลี่ยมผืนผ้าสร้างขึ้นจากทริกเกอร์ชมิตต์ (IC CD4093);
วงจร RC ที่มีไดโอดดับตามด้วย Schmitt trigger/terminal plate พร้อมตัวเก็บประจุแยก 470 pF;
- การรวมวงจร RC ที่แปลงการเปลี่ยนแปลงความกว้างพัลส์เป็นแรงดันไฟฟ้า แรงดันไฟฟ้านี้อยู่ในพื้นที่ 2.9 ... 3.2 โวลต์เมื่อสัมผัสเพลตและ 2.6 โวลต์ไม่เช่นนั้น
- เครื่องเปรียบเทียบ LM 339 ใช้เพื่อเปรียบเทียบแรงดันไฟที่จุด C กับแรงดันอ้างอิงที่จุด D ส่วนหลังมีค่าประมาณ 2.8 V และกำหนดโดยตัวแบ่งแรงดัน
ทันทีที่สัมผัสแผ่นเซ็นเซอร์ เอาต์พุตของวงจรจะทำงาน เพื่ออธิบายการทำงานของวงจร รูปที่ 2 แสดงรูปคลื่นของสัญญาณใน จุดต่างๆ. เส้นประแสดงสถานะเมื่อสัมผัสแผ่นเซ็นเซอร์ เส้นทึบแสดงเมื่อไม่มีการแตะ
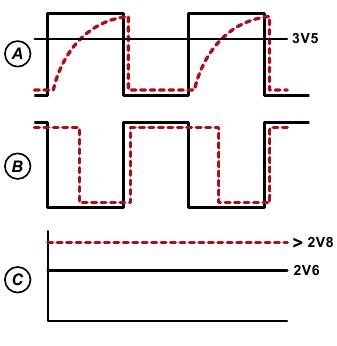
ข้าว. 2. ออสซิลโลแกรมของสัญญาณที่จุดต่างๆ
แรงดันอ้างอิงที่จุด D จะถูกปรับหนึ่งครั้งโดยใช้ตัวแบ่ง R4/R5 (โดยการเปลี่ยนค่าของ R4) ขนาดของแรงดันไฟฟ้านี้ขึ้นอยู่กับพื้นที่ผิวของแผ่นเซ็นเซอร์อย่างมาก (โดยปกติคือสองสามตารางเซนติเมตร) สี่เหลี่ยมใหญ่พื้นผิวของเพลตจะเพิ่มความจุและแรงดันไฟที่จุด C จะมากกว่าแรงดันเมื่อเพลตไม่สัมผัส แรงดันอ้างอิงที่จุด D ควรตั้งค่าให้ใกล้กับ 3.4 V มากขึ้น เซ็นเซอร์สัมผัสสามารถทำงานกับเพลตได้เช่นกัน พื้นที่ขนาดใหญ่(เช่น คุณสามารถใช้ทั้งตัวเป็นเซ็นเซอร์ได้)
สัญญาณเอาท์พุตสามารถใช้เพื่อเปิดโหลดต่างๆ ในหลายกรณี ขอแนะนำให้เพิ่มทริกเกอร์ Schmitt หนึ่งตัวไปยังเอาต์พุต โดยเฉพาะอย่างยิ่งหากเอาต์พุตเชื่อมต่อกับอินพุตดิจิทัล
วิม อบูย์ส

ข้าว. 4. ตำแหน่งของส่วนประกอบบนแผงวงจรพิมพ์


ข้าว. 5. พีซีบี
ข้าว. 6. แผงวงจรพิมพ์ (กระจกมองหลัง)
เซ็นเซอร์สัมผัสแบบ Capacitive
องค์ประกอบหลักที่จำเป็นสำหรับการนำระบบไปใช้ เซ็นเซอร์ capacitiveเป็นตัวเก็บประจุแบบแปรผัน เขาต้องมี การออกแบบที่เรียบง่ายและความไวต่อการสัมผัส เนื่องจากองค์ประกอบการตรวจจับถูกสร้างขึ้นเป็นตัวเก็บประจุแบบ "เปิด" สนามไฟฟ้าสามารถโต้ตอบกับวัตถุ capacitive ภายนอก ในกรณีของเราคือนิ้ว รูปที่ 1 แสดงมุมมองด้านบนและด้านข้างของเซ็นเซอร์ capacitive ที่ใช้งานโดยตรงบนบอร์ด

ข้าว. หนึ่ง.
ดังแสดงในรูปที่ 1 ตัวเก็บประจุก่อตัวระหว่างชั้นสื่อกระแสไฟฟ้ากับพื้น อันตรกิริยาของชั้นนำไฟฟ้าและตัวนำที่อยู่รอบๆ จะสร้างความจุพื้นฐาน ซึ่งสามารถวัดค่าได้ ความจุพื้นฐานของเซ็นเซอร์ดังกล่าวอยู่ที่ประมาณ 10 pF เมื่อตัวนำคือ นิ้วเข้าใกล้ตัวเก็บประจุแบบเปิดอันเป็นผลมาจากการรบกวน สนามไฟฟ้า, ความจุของตัวเก็บประจุเปลี่ยนไป เนื่องจากความจุของนิ้ว ความจุของเซ็นเซอร์จึงเพิ่มขึ้นแม้จะไม่ได้สัมผัส ด้วยการวัดค่าความจุของเซ็นเซอร์และเปรียบเทียบผลลัพธ์แต่ละผลลัพธ์กับค่าความจุพื้นฐาน ไมโครคอนโทรลเลอร์สามารถระบุไม่เพียงแต่การกดปุ่มเท่านั้น แต่ยังรวมถึงลำดับการเปิดสวิตช์ด้วย ซึ่งใช้ในอินเทอร์เฟซที่ซับซ้อนมากขึ้น เช่น ตัวเลื่อน .
ความไวของเซ็นเซอร์ขึ้นอยู่กับระยะห่างระหว่างชั้นสื่อกระแสไฟฟ้าและพื้นดิน ระยะที่แนะนำคือ 0.5 มม. นอกจากนี้ ความไวโดยรวมของระบบขึ้นอยู่กับความหนาของบอร์ด: เมื่อความหนาของบอร์ดลดลง ความไวจะลดลง ความหนาของบอร์ดที่แนะนำคือ 1…1.5 มม.
ความจุของเซ็นเซอร์ที่ไม่มีความจุของนิ้วอยู่ที่ประมาณ 5…10 pF
ชั้นล่างใต้เซ็นเซอร์ป้องกันส่วนประกอบอิเล็กทรอนิกส์อื่นๆ ในระบบ นอกจากนี้ยังช่วยรักษาค่าความจุฐานคงที่ ซึ่งจำเป็นสำหรับการอ้างอิงสำหรับการวัดแต่ละครั้ง
การออกแบบเซนเซอร์และอินเทอร์เฟซผู้ใช้
อินเทอร์เฟซที่สมบูรณ์ประกอบด้วยเซ็นเซอร์คาปาซิทีฟ (ใช้งานบนบอร์ด) เช่นเดียวกับอิเล็กทริกระหว่างเซ็นเซอร์กับนิ้วเมื่อสัมผัส
การนำเซ็นเซอร์ capacitive ไปใช้บนแผงวงจรพิมพ์
สามารถแสดงการพึ่งพาเซ็นเซอร์ Capacitive ได้โดยใช้ตัวอย่างของตัวเก็บประจุแบบแบนทั่วไป รูปที่ 2 แสดงองค์ประกอบที่สำคัญ

ข้าว. 2.
คำว่า "ความจุพื้นฐาน" หมายถึงการวัดค่าความจุของเซ็นเซอร์ที่ไม่ได้รับผลกระทบแต่อย่างใด เพื่อความเรียบง่าย เราใช้ความจุของตัวเก็บประจุที่เกิดจากชั้นสื่อกระแสไฟฟ้าที่ด้านบนของแผงวงจรพิมพ์และชั้นพื้นดินที่ด้านล่าง (แผ่นด้านล่างและแผ่นบนในรูปที่ 2)
ระยะทาง d ถูกกำหนดโดย แผงวงจรพิมพ์. ดังที่กล่าวไว้ก่อนหน้านี้ เมื่อ d ลดลง ความจุพื้นฐานจะเพิ่มขึ้นและความไวลดลง ความจุจำเพาะของพื้นที่ (e 0) และวัสดุ (e r) กำหนดค่าคงที่ไดอิเล็กตริกของบอร์ด
พื้นที่เซ็นเซอร์ A มักจะถูกจำกัดด้วยขนาดของนิ้ว โดยคำนวณจากค่าเฉลี่ยระหว่างนิ้วของเด็กกับผู้ใหญ่ โปรดทราบว่าพื้นที่ของเซ็นเซอร์ที่ไม่ได้ถูกปกคลุมด้วยนิ้วนั้นไร้ประโยชน์
ดังนั้น ในระหว่างกระบวนการพัฒนา จึงจำเป็นต้องลดความจุพื้นฐานของเซ็นเซอร์ให้เหลือน้อยที่สุด เงื่อนไขสำหรับความไวและความน่าเชื่อถือของระบบที่ดีคือการเพิ่มการเปลี่ยนแปลงความจุสูงสุดเมื่อนิ้วเข้าใกล้เซ็นเซอร์ แน่นอนว่า เป้าหมายทั้งสองนี้ไม่มีร่วมกัน: เมื่อพื้นที่เซ็นเซอร์เพิ่มขึ้นตามขนาดของนิ้ว ความจุพื้นฐานจะเพิ่มขึ้น เนื่องจากเป็นสัดส่วนกับ A

ข้าว. 3.
รูปที่ 3 แสดงรูปแบบปุ่มและตัวเลื่อนที่ใช้เป็นตัวอย่างในเอกสารนี้

ข้าว. 4. ชั้นอาคาร (ชั้นสัญญาณสีแดง - บน สีฟ้า - ชั้นล่าง)
รูปที่ 4 แสดงสี่ตัวเลือกสำหรับการวางเซ็นเซอร์บนแผงวงจรพิมพ์ ซึ่งแตกต่างกันในการก่อสร้างชั้นล่าง
ด้านซ้ายบนแสดงเฉพาะชั้นสัญญาณด้านบน: แผ่นเซ็นเซอร์สี่แผ่นล้อมรอบด้วยระนาบพื้นด้านบน ชั้นล่างไม่ได้ใช้ ด้านขวาบนของภาพแสดงการออกแบบบอร์ดแบบเดียวกันโดยมีพื้นที่ครอบคลุมพื้น 25% ซ้ายล่างเป็นรุ่นเติม 50% และขวาเป็นรุ่นเติม 100%
ขอแนะนำให้ใช้ระนาบกราวด์หลายระนาบใต้เซ็นเซอร์แต่ละตัวเพื่อแยกองค์ประกอบของเซ็นเซอร์ออกจากสัญญาณรบกวนและการเปลี่ยนแปลงภายนอกอื่นๆ ที่อาจทำให้เกิดการเปลี่ยนแปลงในความจุฐาน ชัดเจน 100% padding ดังแสดงในด้านซ้าย มุมล่างรูปที่ 4 ให้การแยกสัญญาณรบกวนสูงสุดและยังเพิ่มความจุฐาน เพื่อให้ได้อัตราส่วนที่เหมาะสมที่สุดของการแยกสัญญาณรบกวนและความจุพื้นฐาน เป็นเรื่องปกติที่จะใช้วัสดุเติมตั้งแต่ 50% ถึง 75%
ชั้นฉนวนของเซ็นเซอร์
ในการใช้งานประเภทนี้ ชั้นฉนวนของเซ็นเซอร์จะทำจากพลาสติก ด้วยเลเยอร์นี้ นิ้วมือจะไม่สัมผัสโดยตรงกับเซ็นเซอร์ โมเดลที่แสดงในรูปที่ 2 สามารถใช้เพื่อแสดงภาพอินเทอร์เฟซการโต้ตอบระหว่างนิ้วและตัวเก็บประจุ ในกรณีนี้ ซับด้านล่างทำหน้าที่เป็นเซ็นเซอร์ และส่วนบนทำหน้าที่เป็นนิ้วของผู้ใช้ เป็นที่ชัดเจนว่าเมื่อพื้นที่โต้ตอบเพิ่มขึ้นจนถึงขนาดของนิ้ว A จะเพิ่มขึ้นและการเปลี่ยนแปลงของความจุจะเพิ่มขึ้นสูงสุด เมื่อชั้นฉนวน d เพิ่มขึ้น การเปลี่ยนแปลงของความจุจะลดลงผกผัน ช่วงเวลาสำคัญซึ่งละเลยไม่ได้คือวัสดุที่ใช้ทำฉนวน ค่าคงที่ไดอิเล็กตริกของวัสดุฉนวนตลอดจนความหนาของวัสดุนั้นมีอิทธิพลอย่างมากต่อความไวและความสะดวกในการใช้งานเซ็นเซอร์สัมผัสแบบคาปาซิทีฟ ตารางที่ 1 แสดงค่าคงที่ไดอิเล็กตริกของวัสดุบางชนิด
ตารางที่ 1. ค่าคงที่ไดอิเล็กตริกของวัสดุ
นอกจากตัวฉนวนเองแล้ว จุดสำคัญคือการเชื่อมต่อระหว่างเซนเซอร์กับฉนวน หากการเชื่อมต่อหลวมและมีช่องว่าง ความจุของเซ็นเซอร์จะเปลี่ยนไป ดังนั้นจึงมักใช้ฉนวนกาว
การใช้ MSP430 เพื่อวัดความจุของเซ็นเซอร์สัมผัส
พิจารณาสองวิธีในการวัดความจุของเซ็นเซอร์สัมผัส
วิธีการวัดตามออสซิลเลเตอร์
วิธีแรกขึ้นอยู่กับการใช้ออสซิลเลเตอร์ วิธีนี้สามารถใช้ได้กับ MSP430 โดยใช้ตัวเปรียบเทียบและเซ็นเซอร์ capacitive เป็นองค์ประกอบการปรับแต่ง การเปลี่ยนแปลงความจุของเซ็นเซอร์จะส่งผลให้เกิดการเปลี่ยนแปลงความถี่ ซึ่งสามารถวัดได้โดยใช้ Timer_A บนไมโครคอนโทรลเลอร์ MSP430 รูปที่ 5 แสดงตัวอย่างของระบบดังกล่าว

ข้าว. ห้า.
ตัวต้านทาน R ให้การสนับสนุนตัวเปรียบเทียบเมื่อตั้งค่า Px.y ไว้สูง สัญญาณนี้อยู่ในขั้วตรงข้ามกับสัญญาณการชาร์จหรือการคายประจุของความจุของเซ็นเซอร์ (เซ็นเซอร์ C) ซึ่งนำไปสู่การสั่นในระยะยาว ด้วยค่าความต้านทาน R ที่เท่ากัน ค่าขอบเขตคือ 1/3 V cc และ 2/3 V cc ความถี่การสั่นคำนวณโดยสูตร:
fOSC = 1/
โดยการนับจำนวนช่วงเวลาของการแกว่งในช่วงเวลาที่กำหนด ความถี่สามารถคำนวณได้และสามารถวัดความจุได้ ในแอปพลิเคชันนี้ ความต้านทานของตัวต้านทาน RC คือ 100 kΩ เป็นผลให้ความถี่การสั่นอยู่ที่ประมาณ 600 kHz โดยมีความจุเซ็นเซอร์ 10 pF
VLO 12 kHz แบบบูรณาการถูกใช้เป็นแหล่งสัญญาณนาฬิกา สัญญาณนี้ใช้กับ WDT ตัวจับเวลาการเฝ้าระวัง ด้วยการขัดจังหวะของ watchdog แต่ละครั้ง เคอร์เนลจะตรวจสอบสถานะของ Timer_A timer register, TAR คำนวณความแตกต่างระหว่างค่ารีจิสเตอร์สองค่าสุดท้าย ในความเป็นจริงไม่ต้องการค่าสัมบูรณ์ของความจุ แต่การเปลี่ยนแปลงเท่านั้นที่น่าสนใจ
เป็นไปได้ที่จะสร้างระบบที่มีเซ็นเซอร์คาปาซิทีฟหลายตัว สิ่งนี้ต้องการการสร้างมัลติเพล็กเซอร์บนตัวเปรียบเทียบ Comparator_A + (รูปที่ 6)

ข้าว. 6.
ในการปรับใช้ระบบ จำเป็นต้องมีตัวต้านทานหนึ่งตัวสำหรับเซ็นเซอร์แต่ละตัว และตัวต้านทานสามตัวสำหรับตัวเปรียบเทียบ
วิธีการวัดค่าความจุตามตัวต้านทาน
วิธีที่สองในการวัดความจุของเซ็นเซอร์สัมผัสนั้นใช้ตัวต้านทานภายนอกเพื่อชาร์จหรือปล่อยเซ็นเซอร์ประจุไฟฟ้า พอร์ต MSP430 หนึ่งพอร์ตใช้สำหรับชาร์จหรือคายประจุ เวลาชาร์จหรือคายประจุจะถูกวัดโดยใช้ตัวจับเวลา Timer_A ในตัว รูปที่ 7 แสดงตัวอย่างระบบที่ใช้ไมโครคอนโทรลเลอร์ MSP430 เพื่อวัดเวลาการคายประจุของตัวเก็บประจุ

ข้าว. 7.
ด้วยค่าความจุของเซ็นเซอร์ C = 10 pF และ R = 5.1 M เวลาในการคายประจุจะอยู่ที่ประมาณ 250 µs Px.y ได้รับการกำหนดค่าให้เป็นเอาต์พุตระดับสูงเพื่อชาร์จตัวเก็บประจุ สามารถกำหนดค่าใหม่เป็นอินพุตเพื่อปล่อยเซ็นเซอร์ C ผ่าน R ได้ กระแสสูงสุดผ่านพอร์ต MSP430 คือ ±50 nA
หากพอร์ต Px.y รองรับการขัดจังหวะ (สำหรับ MSP430 สิ่งเหล่านี้คือพอร์ต P1.x และ P2.x) สัญญาณเสียงต่ำภายในสามารถใช้เป็นเกณฑ์ที่จะสร้างได้ เมื่อได้รับอินเตอร์รัปต์นี้ เคอร์เนลจะวิเคราะห์เนื้อหาของ Timer_A timer register ตัวจับเวลาสามารถใช้ DCO ภายในเป็นแหล่งสัญญาณนาฬิกา ความถี่ของสัญญาณที่สร้างขึ้นคือ 8 หรือ 16 MHz (ขึ้นอยู่กับตระกูล MSP430)

ข้าว. 8.
รูปที่ 8 แสดงหนึ่งรอบการวัด ตัวจับเวลาเริ่มนับจากศูนย์และในขณะที่แรงดันไฟฟ้าบนเซ็นเซอร์ถึงเกณฑ์ V IT ค่าตัวจับเวลาจะถูกอ่าน นอกจากนี้ตัวจับเวลาสามารถทำงานในโหมดการนับคงที่ในขณะที่จำเป็นต้องอ่านค่าของมันในเวลาที่จุดเริ่มต้นและจุดสิ้นสุดของการปลดปล่อยตัวเก็บประจุและคำนวณความแตกต่าง เมื่อความจุของเซ็นเซอร์เพิ่มขึ้น เวลาคายประจุของตัวเก็บประจุจะเพิ่มขึ้น และจำนวนรอบของตัวจับเวลาจะเพิ่มขึ้นระหว่างการวัด
ได้กล่าวไว้ข้างต้นว่าแต่ละพอร์ตจำเป็นต้องมีตัวต้านทานหนึ่งตัว วงจรสามารถทำให้ง่ายขึ้นได้โดยใช้ตัวต้านทานหนึ่งตัวสำหรับสองพอร์ต ขณะวัดความจุของเซ็นเซอร์ตัวใดตัวหนึ่ง พอร์ตที่เชื่อมต่อกับตัวที่สองควรมีระดับสัญญาณต่ำ กล่าวคือ ทำหน้าที่เป็นพื้นสำหรับคายประจุ ข้อดีอีกประการของรูปแบบดังกล่าวคือความจุของเซ็นเซอร์แต่ละตัวสามารถวัดได้ในสองทิศทาง: การชาร์จจากศูนย์ถึง ระดับสูงและการคายประจุจาก V cc ถึงเกณฑ์ระดับต่ำ รูปที่ 9 แสดงวิธีนี้

ข้าว. เก้า.
การนับรอบต้องทำสองครั้ง: ระหว่างการชาร์จและการคายประจุ ในเวลาเดียวกัน สัญญาณรบกวน 50/60 MHz มีผลกระทบต่อผลการวัดน้อยกว่า
ซอฟต์แวร์
หลังจากได้รับผลการวัดแล้ว จะต้องตีความด้วยโปรแกรม สัญญาณรบกวนของแหล่งจ่ายไฟ, ออฟเซ็ตนาฬิกา, สัญญาณรบกวนภายนอก 50/60 MHz อาจนำไปสู่การตัดสินใจที่ไม่ดี
ในบางครั้ง เพื่อประสิทธิภาพ คุณสามารถทิ้งผลลัพธ์ที่มีลำดับต่ำสองสามบิต ซึ่งยอมรับได้หากคุณต้องการติดตามเฉพาะการคลิกปุ่มเท่านั้น แต่ถ้าจำเป็นต้องใช้ความละเอียดสูงกว่านี้ จะไม่สามารถจ่ายได้อีกต่อไป การกรองสัญญาณความถี่ต่ำผ่านและการหาค่าเฉลี่ยอย่างง่ายของผลลัพธ์หลายๆ แบบสามารถช่วยให้เสียงรบกวนเป็นไปอย่างราบรื่น แต่เพื่อให้เกิดการใช้พลังงานต่ำ การมีบิตต่ำของผลการวัดมีความสำคัญมากกว่า
การติดตามความจุของฐานเซนเซอร์
หากไม่มีความสามารถในการติดตามการเปลี่ยนแปลงในความจุของเซ็นเซอร์แบบไดนามิก ความไม่เสถียรใดๆ อาจนำไปสู่การตรวจจับที่ผิดพลาดของการกดปุ่มหรือ "เหนียว" พิจารณาตัวแปรด้วยปุ่มธรรมดาที่มีสองสถานะ: เปิด/ปิด หากผลลัพธ์ถูกเลื่อน อาจเข้าใกล้เกณฑ์ที่ถือว่ากดปุ่ม นั่นคือ ค่าบวกที่ผิดพลาดจะเกิดขึ้น
วิธีหนึ่งในการติดตามและปรับความจุฐานแสดงไว้ในรูปที่ 10
คุณต้องใส่ใจกับข้อเท็จจริงที่ว่าการดำเนินการเหล่านี้ดำเนินการกับเซ็นเซอร์แต่ละตัวแยกกัน การคำนวณตัวแปร "เดลต้า" และการปรับ "ฐาน" ทำได้แตกต่างกันในอัลกอริธึม RO และ RC ใน RO ค่าที่วัดได้จะลดลงเมื่อความจุของตัวเก็บประจุเพิ่มขึ้น และใน RC ค่าที่วัดได้จะเพิ่มขึ้น
หลังจากเสร็จสิ้นการวัดแล้ว อันดับแรก จำเป็นต้องพิจารณาว่ามีการแตะเกิดขึ้นหรือไม่ ซึ่งสามารถทำได้โดยการเปรียบเทียบค่าที่ได้รับกับเกณฑ์ที่สอดคล้องกับการสัมผัสที่เบาที่สุดที่สามารถรับรู้ได้ หากพิจารณาแล้วว่าไม่มีการแตะ ค่าฐานจะถูกปรับ การปรับเปลี่ยนจะเกิดขึ้นได้อย่างไรขึ้นอยู่กับทิศทางของการเปลี่ยนแปลง
เมื่อการวัดความจุเพิ่มขึ้น ขอแนะนำให้ปรับค่าฐานให้ช้าลง ผลลัพธ์ที่เพิ่มขึ้นไม่เพียงหมายถึงการเปลี่ยนแปลงอันเป็นผลมาจากข้อผิดพลาดเท่านั้น แต่ยังเป็นผลมาจากการเคลื่อนไหวของนิ้วไปในทิศทางของเซ็นเซอร์ด้วย และหากค่าฐานปรับอย่างรวดเร็ว อาจไม่สังเกตเห็นการสัมผัสจริงของนิ้ว ในการทำเช่นนี้ ขอแนะนำให้ปรับค่าฐานเพียงหนึ่งหน่วยในแต่ละรอบการวัด (ภาพที่ 10)

ข้าว. 10.
การใช้ฟังก์ชันปุ่มปกติ
การสร้างปุ่มเป็นกรณีการใช้งานทั่วไปสำหรับเซนเซอร์แบบคาปาซิทีฟ รูปที่ 11 แสดงตัวอย่างการสร้างระบบด้วยปุ่มสี่ปุ่ม

ข้าว. สิบเอ็ด
เกณฑ์ที่ใช้ในการตัดสินใจว่ากดปุ่มจะต้องสูงกว่าเสียงรบกวน
การใช้งานฟังก์ชันตัวเลื่อน
ฟังก์ชันที่ซับซ้อนมากขึ้นซึ่งจัดอยู่บนเซ็นเซอร์คาปาซิทีฟคือตัวเลื่อน ในกรณีนี้ จำเป็นต้องตรวจสอบเกินเกณฑ์หลายเกณฑ์
วิธีที่ง่ายที่สุดในการสร้างตัวเลื่อนสามารถจัดระเบียบได้หากมีการกำหนดตำแหน่งหลายตำแหน่งสำหรับเซ็นเซอร์แต่ละตัว ตัวอย่างด้านล่าง (รูปที่ 12) พิจารณาระบบที่มีการกำหนดตำแหน่ง 16 ตำแหน่งสำหรับเซ็นเซอร์แต่ละตัว ผลลัพธ์คือระบบ 64 ตำแหน่ง

ข้าว. 12.
DELTAMAX คือค่าความจุสูงสุดที่สามารถเข้าถึงได้ จากนั้นช่วงตั้งแต่ 0 ถึง DELTAMAX จะแบ่งออกเป็นขั้นตอนจำนวนหนึ่ง ศูนย์สอดคล้องกับกรณีที่ไม่ได้กดปุ่ม ตำแหน่งของนิ้วกำหนดโดยค่าสูงสุด ลักษณะการถ่ายโอนเชิงเส้นที่มากขึ้นของระบบทำได้โดยการแก้ไขค่าของเซ็นเซอร์ทั้งหมด
เซ็นเซอร์มัลติเพล็กซ์เพื่อสร้างตัวเลื่อน
เมื่อสร้างตัวเลื่อน คุณสามารถขยายจำนวนเซ็นเซอร์ด้วยจำนวนพอร์ตอินพุต/เอาต์พุตที่จำกัดโดยใช้มัลติเพล็กซ์ ในกรณีนี้ เซ็นเซอร์หลายตัวเชื่อมต่อกับเอาต์พุตเดียว เซ็นเซอร์เพิ่มเติมเพิ่มความจุฐานเท่านั้น อย่างไรก็ตาม ด้วยความจุพื้นฐานที่เพิ่มขึ้น ในขณะที่กระทบกับเซ็นเซอร์เพียงตัวเดียว การตอบสนองของเซ็นเซอร์จึงน้อยลง ดังนั้นจึงเป็นเรื่องปกติที่จะไม่เชื่อมต่อเซ็นเซอร์มากกว่าสองตัวเข้าด้วยกัน
ในการพิจารณาว่าเซ็นเซอร์แบบมัลติเพล็กซ์ตัวใดได้รับผลกระทบ จะต้องแยกจากกันในช่องว่าง ตัวอย่างตำแหน่งของเซ็นเซอร์ในระบบดังกล่าวแสดงในรูปที่ 13

ข้าว. 13.
บทสรุป
บทความนี้กล่าวถึงสองวิธีในการใช้เซ็นเซอร์สัมผัสแบบ capacitive โดยใช้ MSP430 แต่ละวิธีมีข้อดีและข้อเสียของตัวเอง ลองพิจารณาสิ่งหลัก ๆ
- วิธีการตามออสซิลเลเตอร์:
- ต้องใช้ไมโครคอนโทรลเลอร์พร้อม Comp_A + ตัวเปรียบเทียบ
— จำนวนเซ็นเซอร์อิสระถูกจำกัดโดยจำนวนของอินพุต Comp_A+
- ต้องการตัวต้านทานภายนอก R หนึ่งตัวสำหรับเซ็นเซอร์แต่ละตัว เช่นเดียวกับสายโซ่ของ R สามตัว
— ความไวถูกจำกัดโดยการใช้พลังงาน (เวลาการวัดที่ตั้งโปรแกรมได้);
- วิธีการตามตัวต้านทาน:
- ใช้ได้กับไมโครคอนโทรลเลอร์ MSP430 ทุกรุ่น
- เซ็นเซอร์อิสระสูงสุด 16 ตัว (พอร์ต I / O 16 พอร์ตที่ทำงานกับอินเตอร์รัปต์)
— ตัวต้านทานภายนอก R หนึ่งตัวสำหรับเซ็นเซอร์ทุกสองตัว
- ความไวถูกจำกัดโดยความถี่สูงสุดของไมโครคอนโทรลเลอร์ (เวลาการวัดคงที่)
— การใช้พลังงานขั้นต่ำ;
ผู้ใช้สามารถขยายและเพิ่มประสิทธิภาพแอปพลิเคชันเพื่อใช้อุปกรณ์ปลายทางได้
คำอธิบายแบบเต็ม ตัวอย่างต่างๆแอปพลิเคชัน MSP430 แหล่งที่มาของโปรแกรม ข้อมูลเพิ่มเติมสามารถพบได้บนเว็บไซต์ www.siteในหัวข้อไมโครคอนโทรลเลอร์
การรับข้อมูลทางเทคนิค การสั่งซื้อตัวอย่าง การจัดส่ง -
อีเมล:
เครื่องกำเนิดนาฬิกาตระกูลใหม่
Texas Instruments แนะนำครอบครัว เครื่องกำเนิดนาฬิกาที่ตั้งโปรแกรมได้,ด้วยวงจร PLL 1 ถึง 4 วงจร ไอซีช่วยให้คุณสร้างสัญญาณนาฬิกาได้ถึง 9 แบบที่สังเคราะห์จากความถี่อินพุตเดียว แต่ละเอาต์พุตรองรับการตั้งโปรแกรมความถี่ในระบบสูงสุด 230 MHz คุณสมบัติเหล่านี้มีข้อดีหลายประการ ซึ่งรวมถึงการใช้พลังงานที่ลดลง กระบวนการออกแบบที่เร็วขึ้น และความสะดวกในการเปลี่ยนความเร็วสัญญาณนาฬิกาโดยไม่ต้องออกแบบระบบใหม่ ข้อดีเหล่านี้จะช่วยลดต้นทุนการใช้งานของผู้บริโภคได้อย่างมาก รวมถึง IP set-top box, โทรศัพท์ IP, ระบบสื่อดิจิทัล (ทีวีดิจิตอล, อุปกรณ์สื่อสตรีมมิ่ง, เครื่องพิมพ์, ระบบนำทางและอุปกรณ์พกพา)
เครื่องกำเนิดสัญญาณนาฬิกาใหม่ได้รับการปรับแต่งให้ทำงานร่วมกับโปรเซสเซอร์ DaVinci TM (TI) เพื่อสร้างนาฬิกาสำหรับโปรเซสเซอร์ดิจิตอล, ADC หรือตัวแปลงสัญญาณเสียง และตัวควบคุมอีเทอร์เน็ตหรือ USB คริสตัลออสซิลเลเตอร์ที่ควบคุมแรงดันไฟฟ้าในตัว (VCXO) ช่วยให้สามารถซิงโครไนซ์ความถี่ของสตรีมข้อมูลต่างๆ
| องค์ประกอบของตระกูลนาฬิกาใหม่ เครื่องกำเนิดไฟฟ้า |
||
|---|---|---|
| ชื่อ | PLL | เอาท์พุต V |
| CDCE949 | 4 | 2,5/3,3 |
| CDCE937 | 3 | 2,5/3,3 |
| CDCE925 | 2 | 2,5/3,3 |
| CDCE913 | 1 | 2,5/3,3 |
| CDCEL949 | 4 | 1,8 |
| CDCEL937 | 3 | 1,8 |
| CDCEL925 | 2 | 1,8 |
| CDCEL913 | 1 | 1,8 |