Что нужно для лазерного гравера своими руками. Самодельный чпу лазерный гравер из камней и палок
Шаг 6: Подготовка arduino
Когда я взялся за arduino, я начал с того, что стал писать свое программное обеспечение.
Но в процессе того, как я начал искать пути управления движением через серийный порт, я наткнулся на нечто, что называлось "GRBL ". Оказывается это интерпретатор g-кода с большим количеством интересных функций.
У меня все уже было подключено к arduino и поэтому я должен был сделать одну из двух вещей: либо поменять местами подключения, либо изменить что-либо в кодею
Оказалось что гораздо проще изменить выводы управления в программе.
ВАЖНО:
Текущая версия Grbl(0.6b) имеет ошибку в системе очередей.Лазер включается и сразу выключается (M3, M5).
Команды не помещаются в очередь и лазер включается и сразу выключается, как только arduino получает команды.
Это будет решено -но когда, - точно не могу сказать... Вместо этого, мы делаем вот что:
вы можете использовать источник вот отсюда , или же просто взять готовый скомпилированный hex. файл, который я использовал . Это должно решить данную проблему до тех пор, пока не выйдет новая версия Grbl.
Несмотря на то, какой бы путь вы выберете, - в конечном итоге вы должны иметь hex. файл, который вы должны загрузить в дальнейшем в arduino.
Я испробовал несколько различных путей, и тот, который мне понравился больше всего, это когда я использовал программу Xloader .
Программирование является довольно-таки прямолинейным.
Выберите корректный серийный порт для arduino.
Выберите hex. файл, затем тип arduino, после чего нажмите на upload.
Если вы будете использовать новую arduino uno, то программа Xloader не будет работать и вы получите ошибку загрузки.
Поэтому я рекомендую использовать ARP/Arduino Uploader , - но даже этот загрузчик имеет некоторые проблемы с arduino uno.
При программировании arduino, - выберите com-порт и тип вашей arduino(что за модель-полное название, чтобы программа понимала как с ней работать) в соответствующем выпадающем списке.
После этого, вы должны внести изменения в "avr dude params" текст.
Сотрите "-b19200" - без кавычек и нажмите на кнопку загрузки.
В любом случае, через пару секунд вы завершите и будете готовы испытать.
Выйдите из программы Xloader и перейдите к следующему параграфу.
Arduino должна быть настроена для начала работы. Запустите окно вашего любимого терминала и откройте порт, к которому подключена ваша arduino.
Там вы должны увидеть сообщение приветствия:
Grbl 0.6b
"$" to dump current settings"
If you enter $ followed by return you will get a list of options. Something like this:
$0 = 400.0 (steps/mm x)
$1 = 400.0 (steps/mm y)
$2 = 400.0 (steps/mm z)
$3 = 30 (microseconds step pulse)
$4 = 480.0 (mm/sec default feed rate)
$5 = 480.0 (mm/sec default seek rate)
$6 = 0.100 (mm/arc segment)
$7 = 0 (step port invert mask. binary = 0)
$8 = 25 (acceleration in mm/sec^2)
$9 = 300 (max instant cornering speed change in delta mm/min)
"$x=value" to set parameter or just "$" to dump current settings
ok
Grbl 0.6b
"$" сбросить текущие настройки"
Если вы вводите $ получите список опций. Нечто подобное:
$0 = 400.0 (шагов/мм x)
$1 = 400.0 (шагов/мм y)
$2 = 400.0 (шагов/мм z)
$3 = 30 (микросекунд на импульс шага)
$4 = 480.0 (мм/сек скорость подачи по умолчанию)
$5 = 480.0 (мм/сек скорость поиска по умолчанию)
$6 = 0.100 (мм /сегмент дуги)
$7 = 0 (шаг порт инвертировать маску. двоичный = 0)
$8 = 25 (ускорение в мм/сек^2)
$9 = 300 (макс мгновенное изменение скорости на повороте в дельта мм/мин)
"$x=значение" установить параметр или просто "$" сбросить текущие настройки
ok
Вы должны изменить шаги/мм для обоих о53,333 - для обоих. Просто введите "$0=53.33", с последующим возвращением, а затем "$1=53.333" с последующим возвращением. Ось Z можно игнорировать - так как мы ее не используем. Ускорение может быть увеличено до 100 ("$8=100" и обратно). Так как машина движется медленно, ускорение может быть установлено высоким. Другим побочным эффектом низкого ускорения может быть то, что кривые могут быть выжжены более, чем прямые линии, так как контроллер постоянно пытается ускориться и замедлиться и никогда не достигает полной скорости.
Если вы строите аппарат так же, как и я, то может вылезти такая ошибка: одна из ваших осей будет отзеркалена. Но это легко исправить. Опция $7 дает вам возможность изменить направление оси. Я хотел бы изменить направление оси X, поэтому я ввел: "$7=8", так как я хотел изменить битность 3 (8 = 00001000 двоичный). Если вы захотите поменять направление оси Y , вам нужно ввести 16 (00010000) или 24 (00011000) чтобы сменить обе.
Полная документация по инвертированию маски может быть
Итак. Пить перестали, фрезер уже собрали, Ардуину приобрели, руки у нас постепенно выпрямляются - скоро совсем на ХомоСапиенса станем походить. А он, как известно, проблемы привык себе создавать самостоятельно, как китайский комсомолец потом их решать. Таков он русский характер.
Из "ничего" нам понадобятся:
Ардуино Уно
Шилд с парой СтепСтиков
Лазер..... как вариант проще приобрести, но если ум пытливый, можно и ДВД-юшный поковырять
Два старых СД/ДВД рома, лучше все таки старых
Блок питания на 12вольт.... ампер так немного 2-3-5-10 не важно вообщем
Немного сверлилки, немного винтиков М4 и М3
Два кусочка квадратной трубы 20х20мм и длиной 180мм
Микросхема ULN2003 буковки могут быть и другими - для нас важны цыферки 2003. Эта микросхема часто используется в старых сканера Мастек для управления шаговым мотором.
Вообщем у настоящего хозяина такого хлама обычно в достатке....
Если Ардуино в доме не нашлось, Можно поискать например на Авито или AliExpress
Шилд лучше тоже заказать заранее.... например
3D Printer Engraving Machine A4988 Drive Extension Board CNC Shield V3 For Arduino +
StepStick 2 шт
walkera new v120d02s 6ch 3d rc remote control helicopter bnf green (Red)
Если лазера в хламе почему то вдруг не оказалось, его можно присмотреть тут:
405nm 50mW Focusable Violet Dot Laser Module Laser Generator Diode Focusable Laser Module Red Dot Laser Generator Diode 200-250mW 650nm ,
450-500mW Violet Laser Module With Holder For Mini Engraving Machine И вдруг настало время для страшилок.
Друзья, имея дело с лазером остерегайтесь попадания в глаза прямого и даже отраженного лазерного луча. Можно лишиться зрения навсегда. Лучше всего все работы проводить в специальных очках, которые всегда продаются в отделах, торгующих лазерными
диодами.
Ну а если влом ждать пока китайцы пришлют долгожданную посылку, вполне можно поэкспериментировать с лазерным диодом от DVD-RW. На последнем остановлюсь. Разбирая пишущий двд будьте внимательны - в нем обычно используется два диода - один с видимым (обычно красным) спектром излучения, второй с невидимым инфракрасным. Использовать второй крайне не рекомендую в плане безопасности.
Чтобы проверить светодиод, подключаем к нему обычную батарейку на 1,5 вольта. Если излучение красное - все ок..1421879657252.prev.jpg)
Начинаем курочить....простите...разбирать СД-ромы. Распрямляем скрепку и толкаем в отверстие в лицевой части устройства. Отсек для диска откроется, снимаем крышечку отсека и выворачиваем винты. Дальше все как везде.

Крышечку отсека я сразу приклеил к лицевой панели

Выкидываем лоток, платы, вообщем максимально высвобождаем внутренне пространство бывшего двд-юка. Сюда у нас впоследствии втанет блок питания

Я вкорячил блок питания от какого то принтера НР, переделав его с 38 вольт на 12. Мощности его хватит за глаза.
Дальше еще проще - из ДВД выколупываем пару сильных магнитов (в блоке линзы), приклеиваем их к лазеру. Стараемся сильно не нагревать, если клеим термопистолетом.
Сверлим и пилим квадратные загoтовки труб.

Отверстия ф4мм с лицевой стороны и с другой рассверливаем до 10мм
Прикручиваем к корпусу ДВД-юка.
Используя резиновые демпферы из самого двд, прикручиваем линейные приводы к корпусу.



Получаем что то типа.....
От второго корпуса ДВД отрезаем полоску сталюки и термопистолетом приклеиваем к горизонтальному линейному модулю - как на фото (к нему с помощью магнитов крепим лазер)

На нижний привод опять же с помощью термоклея клеим кусочек оргстекла/пластика толщиной 4мм и размером примерно 45х35мм. К нему на суперклей с активатором клеим рабочий стол. Его я вырезал из корпуса старого флоппика 3,5"
Стараемся стол приклеить строго горизонтально.

С обратной стороны на заклепы пристреливаем кусок пластика или оргстекла - к нему на двусторонний скотч будем крепить электронику.

Да, чуть не забыл - линейные модули я крепил на резиновые втулочки от каких то старых принтеров - вполне можно использовать любые подходящие трубочки - например ровно нарезать старый фломастер.
Итак добрались к электронике. На самом деле она проста

Несмотря на то, что на шилде написано 12-36 вольт, питать его следует 12-ю.
Если моторы крутятся в противоположную сторону - просто выключаем питание и разворачиваем разъем на 180 градусов.
Разъем имеет распиновку АаВв (начало первой обмотки, конец первой обмотки начало вторй обмотки конец второй обмотки)
Лазер питается и управляется микросхемой 2003. Используется всего четыре выхода микросхемы.

Сама программа
(Mylaser.zip)
Прошивка HEX
(grbl_v0_8c_atmega328p_16mhz_9600.hex.rar)
Прошивка Ардуино
(grbl-master.rar)
Программа GRBL controller
(GrblController361Setup.rar)
Очень важно залить прошивку в ардуину с битрейтом 9600. С другим битрейтом программа просто не будет видеть ардуину.
Необходимо залить в ЕЕPROM значения "шаг на мм" у шаговиков в СД/ДВД ромах обычно 20 шагов на оборот. В СтепСтиках обычно используется мультипликатор 1/16 - т.е. 320 шагов. За оборот привод проходит обычно 3мм (необходимо померять растояние между витками на винте привода). 320/3 = 106 шагов на 1 мм.
Вносим это значение с помощью командной строки в программе GRBL Controller
$100=106 (Enter)
$101=106 (Enter)
$102=106 (Enter)
Залить прошивку в Ардуино Уно с помощью программы Ардуино можно след. образом:
Распаковываем архив
Переименовываем (например просто в GRBL)
Копируем в папку "библиотеки"
Открываем программу, меню Скетч - загрузить библиотеку - выбираем GRBL
.1421957319229.prev.jpg)

PS заготовка к рабочему столу крепится с помощью все тех же магнитов из головки ДВД
PPS фокусировка лазера производится поднятием / опусканием диода относительно стола. Для этого мы предусмотрели крепление на магните.
Внимание! Будьте осторожны при использовании лазеров. Лазер, применяемый в этой машине, может вызвать повреждение зрения и, возможно, слепоту. При работе с мощными лазерами, более 5 мВт, всегда надевайте пару защитных очков, предназначенных для блокировки длины волны лазера.
Лазерный гравер на Arduino – приспособление, роль которого – гравировка древесины и других материалов. За последние 5 лет лазерные диоды продвинулись вперед, что позволило сделать достаточно мощные граверы без особой сложности управления лазерными трубами.
Стоит осторожно гравировать другие материалы. Так, например, при использовании в работе с лазерным прибором пластмассы появится дым, который содержит опасные газы при сжигании.
В этом уроке я постараюсь дать направление мысли, а со временем мы создадим более подробный урок по реализации этого непростого устройства.
Для начала предлагаю посмотреть того как выглядел весь процесс создания гравера у одного радиолюбителя:
Сильные шаговые двигатели также требуют драйверов, чтобы максимально использовать их. В данном проекте взят специальный шаговый драйвер для каждого мотора.
Ниже приведены некоторые сведения о выбранных компонентах:
- Шаговый двигатель – 2 штуки.
- Размер кадра – NEMA 23.
- Крутящий момент 1.8 Нм на 255 унций.
- 200 шагов/оборотов – за 1 шаг 1,8 градусов.
- Ток – до 3,0 А.
- Вес – 1,05 кг.
- Биполярное 4-проводное соединение.
- Шаговый драйвер – 2 штуки.
- Цифровой степпинг-драйв.
- Микросхема.
- Выходной ток – от 0,5 А до 5,6 А.
- Ограничитель выходного тока – снижает риск перегрева двигателей.
- Сигналы управления: входы Step и Direction.
- Частота импульсного входа – до 200 кГц.
- Напряжение питания – 20 В – 50 В постоянного тока.
Для каждой оси двигатель непосредственно управляет шариковым винтом через соединитель мотора. Двигатели монтируются на раме с использованием двух алюминиевых углов и алюминиевой пластины. Алюминиевые углы и плита имеют толщину 3 мм и достаточно прочны, чтобы поддерживать двигатель (1 кг) без изгибов.
Важно! Нужно правильно выровнять вал двигателя и шариковый винт. Соединители, которые используются, имеют некоторую гибкость, чтобы компенсировать незначительные ошибки, но если ошибка выравнивания слишком велика, они не сработают!
Еще один процесс создания данного устройства можно посмотреть на видео:
2. Материалы и инструменты
Ниже представлена таблица с материалами и инструментами, необходимыми для проекта «лазерный гравер на Aрдуино».
| Пункт | Поставщик | Количество |
| Шаговый двигатель NEMA 23 + драйвер | eBay (продавец: primopal_motor) | 2 |
| Диаметр 16 мм, шаг 5 мм, шариковый винт длиной 400 мм (тайваньский) | eBay (продавец: silvers-123) | 2 |
| 16-мм ая поддержка BK12 с шариковым винтом (приводной конец) | eBay (продавец: silvers-123) | 2 |
| 16 мм BF12 Поддержка шарикового винта (без ведомого конца) | eBay (продавец: silvers-123) | 2 |
| 16 вал длиной 500 мм | (продавец: silvers-123) | 4 |
| (SK16) 16 опоры вала (SK16) | (продавец: silvers-123) | 8 |
| 16 линейный подшипник (SC16LUU) | eBay (продавец: silvers-123) | 4 |
| eBay (продавец: silvers-123) | 2 | |
| Держатель вала 12 мм (SK12) | (продавец: silvers-123) | 2 |
| A4-размер 4,5 мм прозрачный акриловый лист | eBay (продавец: acrylicsonline) | 4 |
| Алюминиевая Плоская штанга 100 мм x 300 мм x 3 мм | eBay (продавец: willymetals) | 3 |
| 50 мм x 50 мм 2.1 м Алюминиевый забор | Любой тематический магазин | 3 |
| Алюминиевая Плоская штанга | Любой тематический магазин | 1 |
| Алюминиевый угол | Любой тематический магазин | 1 |
| Алюминиевый угол 25 мм x 25 мм x 1 м x 1,4 мм | Любой тематический магазин | 1 |
| Винты с головной головкой M5 (различные длины) | boltsnutsscrewsonline.com | |
| M5 гайки | boltsnutsscrewsonline.com | |
| M5 шайбы | boltsnutsscrewsonline.com |
3. Разработка основания и осей

Машина использует шариковые винты и линейные подшипники для управления положением и движением осей X и Y.
Характеристики шариковых винтов и аксессуаров машины:
- 16 мм шариковый винт, длина – 400 мм-462 мм, включая обработанные концы;
- шаг – 5 мм;
- C7 рейтинг точности;
- BK12/BF12 шариковые опоры.
Так как шариковая гайка состоит из шариковых подшипников, катящихся в гусеничном ходу против шарикового винта очень малого трения, это означает, что двигатели могут работать на более высоких скоростях без остановки.
Вращательная ориентация шариковой гайки блокируется с помощью алюминиевого элемента. Базовая плита крепится к двум линейным подшипникам и к шариковой гайке через алюминиевый угол. Вращение вала Ballscrew приводит в линейное движение опорную плиту.
4. Электронная составляющая

Выбранный лазерный диод – это диод мощностью 1,5 Вт, 445 нм, установленный в корпусе размером 12 мм, с фокусируемым стеклянным объективом. Такие могут быть найдены, предварительно собраны, на eBay. Так как это лазер 445 нм, свет, который он производит, является видимым синим светом.
Лазерный диод требует радиатора при работе на высоких уровнях мощности. При конструировании гравера используются две алюминиевые опоры для SK12 12 мм, как для крепления, так и для охлаждения лазерного модуля.
Интенсивность выхода лазера зависит от тока, который проходит через него. Диод сам по себе не может регулировать ток, и, если он подключен непосредственно к источнику питания, он будет увеличивать ток до тех пор, пока он не разрушится. Таким образом, для защиты лазерного диода и управления его яркостью требуется регулируемая схема тока.
Еще один вариант схемы соединения микроконтроллера и электронных деталей:

5. Программное обеспечение
Эскиз Arduino интерпретирует каждый блок команд. Существует несколько команд:
1 – переместите ПРАВО на один пиксель FAST (пустой пиксель).
2 – переместите ПРАВО на один пиксель SLOW (сгоревший пиксель).
3 – переместите ЛЕВЫЙ на один пиксель FAST (пустой пиксель).
4 – переместите LEFT на один пиксель SLOW (сгоревший пиксель).
5 – перемещение вверх на один пиксель FAST (пустой пиксель).
6 – переместите UP на один пиксель SLOW (сгоревший пиксель).
7 – переместите ВНИЗ одним пикселем FAST (пустой пиксель).
8 – переместите ВНИЗ одним пикселем SLOW (сгоревший пиксель).
9 – включить лазер.
0 – выключить лазер.
r – вернуть оси в исходное положение.
С каждым символом Arduino запускает соответствующую функцию для записи на выходные выводы.
Arduino контролирует скорость двигателя через задержки между ступенчатыми импульсами . В идеальном случае машина будет запускать двигатели с одинаковой скоростью, независимо от того, гравирует ли ее изображение или пропускает пустой пиксель. Однако из-за ограниченной мощности лазерного диода машина должна немного замедляться при записи пикселя . Вот почему есть две скорости для каждого направления в списке символов команд выше.
Скетч 3-х программ для лазерного Arduino-гравера ниже:
/* Stepper motor control program */
// constants won"t change. Used here to set pin numbers:
const int ledPin = 13; // the number of the LED pin
const int OFF = 0;
const int ON = 1;
const int XmotorDIR = 5;
const int XmotorPULSE = 2;
const int YmotorDIR = 6;
const int YmotorPULSE = 3;
//half step delay for blank pixels - multiply by 8 (<8ms)
const unsigned int shortdelay = 936;
//half step delay for burnt pixels - multiply by 8 (<18ms)
const unsigned int longdelay = 2125;
//Scale factor
//Motor driver uses 200 steps per revolution
//Ballscrew pitch is 5mm. 200 steps/5mm, 1 step = 0.025mm
//const int scalefactor = 4; //full step
const int scalefactor = 8; //half step
const int LASER = 51;
// Variables that will change:
int ledState = LOW; // ledState used to set the LED
int counter = 0;
int a = 0;
int initialmode = 0;
int lasermode = 0;
long xpositioncount = 0;
long ypositioncount = 0;
//***********************************************************************************************************
//Initialisation Function
//***********************************************************************************************************
void setup()
{
// set the digital pin as output:
pinMode(ledPin, OUTPUT);
pinMode(LASER, OUTPUT);
for (a = 2; a <8; a++){
pinMode(a, OUTPUT);
}
a = 0;
setinitialmode();
digitalWrite (ledPin, ON);
delay(2000);
digitalWrite (ledPin, OFF);
// Turn the Serial Protocol ON
Serial.begin(9600);
}
//************************************************************************************************************
//Main loop
//************************************************************************************************************
void loop()
{
byte byteRead;
if (Serial.available()) {
/* read the most recent byte */
byteRead = Serial.read();
//You have to subtract "0" from the read Byte to convert from text to a number.
if (byteRead!="r"){
byteRead=byteRead-"0";
}
//Move motors
if(byteRead==1){
//Move right FAST
fastright();
}
if(byteRead==2){
//Move right SLOW
slowright();
}
if(byteRead==3){
//Move left FAST
fastleft();
}
if(byteRead==4){
//Move left SLOW
slowleft();
}
if(byteRead==5){
//Move up FAST
fastup();
}
if(byteRead==6){
//Move up SLOW
slowup();
}
if(byteRead==7){
//Move down FAST
fastdown();
}
if(byteRead==8){
//Move down SLOW
slowdown();
}
if(byteRead==9){
digitalWrite (LASER, ON);
}
if(byteRead==0){
digitalWrite (LASER, OFF);
}
if (byteRead=="r"){
//reset position
xresetposition();
yresetposition();
delay(1000);
}
}
}
//************************************************************************************************************
//Set initial mode
//************************************************************************************************************
void setinitialmode()
{
if (initialmode == 0){
digitalWrite (XmotorDIR, OFF);
digitalWrite (XmotorPULSE, OFF);
digitalWrite (YmotorDIR, OFF);
digitalWrite (YmotorPULSE, OFF);
digitalWrite (ledPin, OFF);
initialmode = 1;
}
}
//************************************************************************************************************
// Main Motor functions
//************************************************************************************************************
void fastright()
{
for (a=0; a
6. Запуск и настройка
Arduino представляет мозг для машины. Он выводит сигналы шага и направления для шаговых драйверов и сигнала разрешения лазера для драйвера лазера. В текущем проекте для управления машиной требуется только 5 выходных контактов. Важно помнить, что основания для всех компонентов должны быть связаны друг с другом.
7. Проверка работоспособности
Эта схема требует, по меньшей мере, питания 10 В постоянного тока, и имеет простой входной сигнал включения/выключения, который предоставляется Arduino. Микросхема LM317T представляет собой линейный регулятор напряжения, который настроен, как регулятор тока. В схему включен потенциометр, позволяющий регулировать регулируемый ток.
В предыдущей статье я описал опыт сборки и наладки гравера из китайского набора. Поработав с аппаратом, понял, что в моей лаборатории он будет не лишним. Задача поставлена, буду решать.
На горизонте два варианта решения — заказ набора в Китае и разработка собственной конструкции.
НЕДОСТАТКИ КОНСТРУКЦИИ С ALIEXPRESS
Как и писал в предыдущей статье, набор оказался вполне работоспособным. Практика работы со станком выявила следующие недостатки конструкции:
- Плохо проработана конструкция каретки. На видео в предыдущей статье это хорошо заметно.
- Ролики подвижных узлов крепятся на панелях винтами М5 и связаны с панелью только с одной стороны. При этом, как ни затягивай винты, остается люфт.
ПЛАСТИКОВЫЕ ДЕТАЛИ
Поскольку каркас из станочного профиля вполне достойный, устранить выявленные недостатки получилось переработав пластиковые детали.
Держатель лазера я достаточно хорошо описал в . Также в конструкцию я добавил дополнительную деталь, связывающую все четыре ролика на правой и левой панелях. Деталь позволила исключить люфты при перемещении панелей.
Все детали имеют достаточно простые формы и не требуют поддержек и других сложностей при печати.
Для заказа набора пластиковых деталей необходимо перейти в интернет-магазин:
Модели пластиковых деталей для печати доступны:
ДЕМОНСТРАЦИЯ РАБОТЫ
Работу гравера и его внешний вид можно оценить в следующем видео.
КОНСТРУКЦИЯ ГРАВЕРА
Каркас гравера построен на станочном алюминиевом профиле 20х40. Детали, несущие подвижные части гравера выполнены на 3D принтере. Подвижные части перемещаются на стандартных роликах. Каретка, несущая лазерный модуль позволяет регулировать высоту лазера над рабочим столом, что позволяет фокусировать мощность лазерного луча в достаточно большом диапазоне.
Сборка конструкции показана в формате 3D PDF .
СБОРКА
Конструкция весьма простая. По этой причине много времени и мучений на сборку не уйдет, если соблюдать рекомендованную последовательность сборки.
ШАГ 1. КАРКАС
Как описано выше, каркас построен из конструкционного профиля 20х40. Для скручивания профиля между собой используются внутренние уголки.
На более длинных деталях в центральных отверстиях торцов нарезана резьба для монтажа ножек и боковых панелей (на средней по длине).

Каркас скручивается на уголках, короткими деталями внутрь. На данном этапе не стоит до конца затягивать винты — сделать это лучше после установки ножек.

Ножки крепятся на винтах в четырех точках. Это сделано для того, чтобы каркас собирался без возможных перекосов.

Для начала потребуется закрепить все четыре ножки, снова не до конца затягивая крепеж.

Теперь необходимо найти максимально ровную поверхность! Выставить все детали таким образом, чтобы каркас «стоял» плотно, не играя на поверхности.

Протягиваем все крепежи, начиная с внутренних уголков и контролируя возможные перекосы угольником.

ШАГ 2. ПРАВАЯ ПАНЕЛЬ
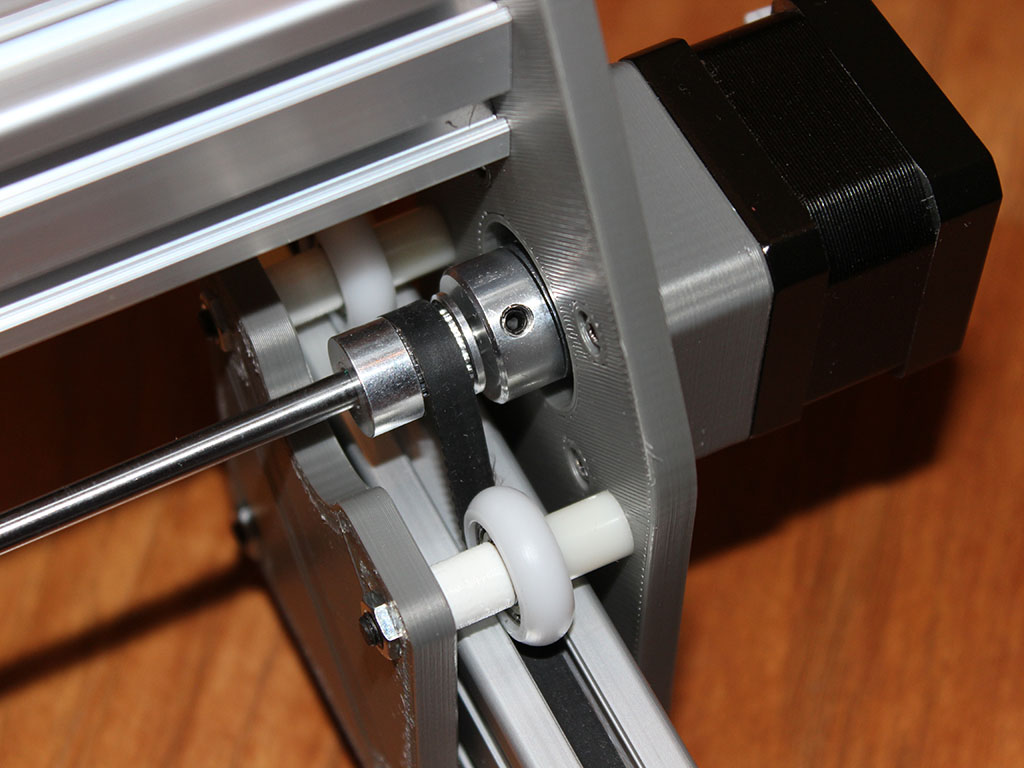
Перед сборкой правой панели на вал двигателя необходимо установить гибкую муфту.

Затем необходимо прикрутить шаговый двигатель через проставку из пластика.

Положение кабельного вывода и проставка хорошо видны на рисунке ниже.

ШАГ 3. ЛЕВАЯ ПАНЕЛЬ
Для сборки левой панели потребуется только запрессовать подшипник в отверстие.

Я постарался исключить операцию склеивания. Для этого «пустил волну» по поверхности отверстия для установки подшипника. По этой причине необходимо с усилием вдавить подшипник.

ШАГ 4. МОНТАЖ ЛЕВОЙ ПАНЕЛИ


Затем установить сборку на профиль.

И закрепить нижние ролики. На рисунке хорошо видно, что крепежные отверстия винтов для крепления роликов имеют ход в несколько миллиметров. Это сделано для того, чтобы верхние и нижние ролики можно было хорошо стянуть на профиле, исключив люфт. Единственное, действовать потребуется аккуратно и не перетянуть. В этом случае шаговому двигателю потребуется излишнее усилие для перемещения панелей.

ШАГ 5. МОНТАЖ ПРАВОЙ ПАНЕЛИ
Для монтажа потребуются следующие детали.

Сначала потребуется установить верхние ролики.

Затем установить сборку на профиль и установить нижние ролики. Дальнейший монтаж идентичен монтажу левой панели.

После протягивания винтов потребуется проконтролировать ход панели. Она должна перемещаться достаточно легко и при этом отсутствовать люфт.

ШАГ 6. МОНТАЖ НАПРАВЛЯЮЩЕЙ КАРЕТКИ
Для передачи движения по оси Y в данной конструкции используются обе панели. Для того, чтобы не задействовать 2 шаговых двигателя, крутящий момент на левую панель передается через вал, диаметром 5мм. После подготовки деталей приступаем.

Сначала устанавливается связующий вал и зажимается стопорными винтами гибкой муфты.

При установке необходимо проконтролировать, чтобы не были забыты шкивы. Жестко крепить их в данный момент нет необходимости. При натягивании ремней потребуется регулировка.

ШАГ 7. КАРЕТКА
Сборка каретки детально рассмотрена в предыдущей статье…

Сборка не представляет особого труда.

ШАГ 8. МОНТАЖ КАРЕТКИ НА НАПРАВЛЯЮЩУЮ
Для начала потребуется собрать все необходимые детали.

Все операции монтажа идентичны операциям монтажа панелей.

ШАГ 9. МОНТАЖ РЕМНЕЙ
Ремни притягиваются винтами под гайки профиля. Потребуется по-месту отрезать 3 ремня и подготовить крепеж.

Для начала край ремень располагается в нише профиля зубом вниз. После этого устанавливается гайка. Для установки гайки потребуется усилие.

Во время натягивания ремня потребуется выставить положение шкива. Шкив выставляется так, чтобы на всем ходу ремень как можно меньше притирался к боковым граням шкива.
Для установки ремня направляющей каретки лучше приподнять ее как показано на рисунке ниже, поскольку гайки все же лучше установить в нишу с торца.

После направляющая опускается на штатное место.

Перед затягиванием второго «хвоста» ремня необходимо убедиться, что ремень натянут достаточно сильно.

На этом сборка механики завершается.

КОНТРОЛЛЕР
Описание контроллеров для управления гравером я планирую подготовить в отдельной статье. Следите за публикациями!
НАБОР ДЛЯ СБОРКИ И ЛАЗЕРНЫЙ ГРАВЕР ПОД КЛЮЧ
С декабря 2017 принимаю заказы на полный набор для сборки и собранного, настроенного и полностью готового к использованию лазерного гравера, описанного в статье. Информация доступна в интернет-магазине .
Если Вам помогла статья и есть желание поддержать новые проекты, ссылка для поддержки:

Граверы широко применяются в различных отраслях производства не только для гравировки различных материалов, но и для сверления миниатюрных отверстий, полирования, шлифования, фрезерования. Такие же операции с их помощью можно выполнять в домашних условиях. Если это требуется только изредка, или нужно просто сэкономить на покупке инструмента, то мини-дрель можно сделать самостоятельно из ненужной техники, которая часто лежит неиспользуемая в гаражах или кладовых комнатах. С помощью самодельных бормашин можно будет выполнять такие же операции, как и с заводским инструментом аналогичной мощности, только понадобится применять соответствующие насадки.
Граверы по особенностям своего функционирования делят на фрезерные и лазерные. В первых материал обрабатывается различными насадками. В лазерных моделях всю работу выполняет лазерный луч — это бесконтактный способ гравировки . При этом такое устройство относится к категории высокотехнологичного оборудования. Но самодельный гравер возможно сделать и в домашних условиях.
Чтобы создать лазерный гравер своими руками, понадобятся следующие детали, инструменты и материалы:
- шаговые электродвигатели из dvd-привода;
- вычислительная платформа Arduino;
- плата Proto Board с дисплеем;
- концевые выключатели для двигателей;
- лазерный модуль (например, мощностью 3 Вт);
- устройство регулировки величины постоянного напряжения;
- система охлаждения лазера;
- MOSFET (транзистор);
- платы для сборки элементов управления электродвигателями;
- корпус;
- зубчатые шкивы и ремни для них;
- различных размеров подшипники;
- доски из дерева: 2 штуки размером 135х10х2 см и еще две — 125х10х2 см;
- 4 круглых металлических стержня сечением 10 мм;
- смазка;
- хомуты, болты с шайбами и гайками;
- тиски;
- слесарные инструменты;
- сверла;
- электролобзик или циркулярная пила;
- напильники либо наждачная бумага;
- компьютер или ноутбук.
Шаговые электромоторы можно взять не только из DVD, но и из принтера, который практически не используется.
Станок собирают по такому алгоритму:
- создают основание;
- монтируют направляющие с подвижными каретками;
- собирают электрическую схему;
- устанавливают нужные программы на компьютер;
- проводят юстировку (настройку) лазерной головки;
- проверяют работоспособность станка.
Схема подсоединения шаговых электрических моторов, взятых из струйного принтера либо DVD, показана на фотографии ниже.
Вся последовательность действий, позволяющая собрать лазерный гравер на arduino, в деталях продемонстрирована в видеоролике далее.
Созданный ЧПУ-гравер обойдется гораздо дешевле , чем любые лазерные модели заводского производства. Его можно будет использовать для изготовления печатей, для фоторезиста, для работ с деревом, фанерой, пластиком, картоном, пенополистиролом и пробковыми листами. Также возможно выполнение гравировки по металлу.
Сборка электрического гравера со штативом и гибким валом
Электрический гравер – это самая распространенная в домашних условиях разновидность данного рода инструментов. Чтобы сделать функционально полноценное устройство самостоятельно, способное соперничать с аналогами промышленного производства, понадобится электродвигатель, который работает от переменного тока 220 V . Такие электрические моторы можно взять со следующей техники:
- катушечных магнитофонов советского образца;
- DVD-проигрывателей;
- стиральных машин;
- угловых шлифовальных машин;
- электрических швейных машин.
Последний вариант является оптимальным, потому что есть возможность регулировки числа оборотов в достаточно широком диапазоне с помощью встроенного реостата.
Для бытового использования достаточно бормашины со скоростью вращения двигателя на холостом ходу до 6 тысяч оборотов в минуту.
Держать в одной руке электромотор от любой из перечисленных разновидностей техники неудобно, а также в большинстве случаев просто невозможно. Поэтому понадобится гибкий вал для гравера . При этом общий вид будущего устройства получится, приблизительно, как на фотографии далее.

Функциональные возможности создаваемого приспособления для гравирования будут зависеть от применяемых при сборке материалов и механизмов. Мотор можно поставить на столе, но удобнее сделать штатив для гравера , вернее его подобие.
Изготовление гибкого вала
С гибким валом все относительно просто. Его можно сделать несколькими способами:
- из старого приводного вала, например, от стоматологической бормашины;
- воспользовавшись тросиком спидометра мотоцикла либо автомобиля.
Рабочую насадку на вал можно также использовать от бормашины либо изготовить самостоятельно из разных материалов, например, из дерева, текстолита, пластиковых труб. Из текстолита приспособление (ручку) для удержания оснастки делают так:
- отрезают 2 текстолитовые платины (толщина листа должна быть около 1 см) размером примерно 2 на 10 см;
- соединяют их вместе и обтачивают напильником или на наждаке снаружи, чтобы получился цилиндр;
- протачивают с внутренней стороны пазы;
- металлическими кольцами фиксируют части друг с другом;
- в переднюю часть ручки вставляют трубочку, под патрон, состоящий из двух отдельных половинок, соединяемых при помощи болта.
В итоге получится рукоять, как на фото ниже.
Сделанное внутреннее отверстие между текстолитовыми пластинами должно быть такого сечения, чтобы не препятствовать свободному вращению тросика. В патрон можно будет вставлять насадки с диаметром хвостовиков от 2 до 5 мм.
Сборка гравировальной установки
Очень просто сделать штатив (основание для установки электродвигателя) из фанеры либо того же текстолита. Для этого поступают так:
- вырезают из листа материала несколько кусков (достаточно 4) соответствующего электродвигателю размера;
- к одному из фрагментов прикрепляют мотор с помощью хомутов;
- собирают короб;
- в передней части просверливают отверстие под гибкий вал.
Созданную конструкцию подвешивают к стене.

Удобно использовать заводской держатель на струбцинах для гравера, если позволяют размеры электродвигателя. Крепление подсоединяется к любому столу. Но такое приспособление потребуется приобрести дополнительно.
Дальнейшую сборку гравировального устройства выполняют в такой последовательности:
- с помощью муфты, созданной из просверленного болта, соединяют тросик с валом электродвигателя;

- одевают на тросик резиновый шланг соответствующего диаметра и присоединяют к нему сделанную ручку;

- устанавливают пусковую кнопку;
- подсоединяют оборудование к сети;

- проверяют работоспособность сделанного приспособления.
Самодельная бормашина позволит обрабатывать древесину, кость, метал, стекло, пластик, керамические заготовки, а также разные металлы, природный и искусственный камень.
Можно также применять при создании самодельных прямошлифовальных машин электромоторы, рассчитанные на 380 V , но если их можно приспособить на 220. В таких случаях понадобится дополнительно повозиться. Информации по данному вопросу много как в интернете, так и в книгах по электротехнике.
Делаем мини-дрель из моторчика
Случается, что в домашних условиях требуется сделать маленькие отверстия в дереве либо пластике, при этом сверла от дрели не подходят. В таких случаях поможет самодельная мини-дрель из моторчика. С ее помощью может также выполняться гравировка по дереву . А если присутствует интерес к радиолюбительству, то используя созданный инструмент можно сверлить и резать платы.
Чтобы создать самодельное приспособление, потребуется взять миниатюрный электродвигатель от старого магнитофона . Подойдут даже различные модели моторчиков от детских игрушек. Если в качестве привода использовать мини-двигатель от магнитофона на 12 V, то еще потребуются такие материалы и детали:
- блок питания или несколько батарей (аккумулятор) с выходом 12 V;
- отрезок трубы из пластика (около 10 см длиной) таким сечением, чтобы внутрь можно было вставить миниатюрный электромотор;
- термоустойчивый клей;
- кнопка включения;
- проводки для электрических соединений.
Мини-дрель своими руками собирают, действуя по следующему алгоритму:
- с помощью электродрели или ножа в трубке делают отверстие под переключатель;
- смазывают моторчик клеем, чтобы зафиксировать его внутри будущего корпуса;

- вставляют электродвигатель в трубку;
- любой из проводов, по которым осуществляется питание моторчика, высовывают в просверленное в корпусе ранее отверстие, а другой конец оставляют с задней стороны корпуса;

- в отверстие под кнопку вставляют один проводок от блока питания;
- припаивают с помощью паяльника к высунутым концам переключатель, аккуратно изолируя при этом контакты;

- оставшиеся с торца трубки два проводка (от кнопки и моторчика) подсоединяют к разъему для подсоединения блока питания;

- отрезают горлышко от любой пластиковой бутылки;
- делают в крышке по центру отверстие под разъем и склеивают данные детали;
- приклеивают горлышко к трубке;

- подключают собранную мини дрель к блоку питания;

- нажатием кнопки проверяют работоспособность самоделки.
Вольтаж питающего блока следует подбирать, чтобы он соответствовал рабочему напряжению используемого электромоторчика.
Чтобы сделать мини дрель автономной, достаточно просто приспособить к ней батарейки.
Самодельный дремель из дрели и блендера
Если имеется старый либо ненужный блендер, то из него также несложно сделать мини-дрель. У этого бытового прибора уже есть удобная рукоять. Кроме самого блендера, понадобятся еще такие приспособления и дополнительные детали:
- инструменты, чтобы разобрать устройство (отвертки с разными наконечниками, плоскогубцы);
- штангенциркуль либо линейка;
- цанговый патрон;
- паяльник с набором для пайки;
- напильник для финишной обработки, наждачная бумага;
- переключатель.
Можно обойтись и без последней детали, но тогда потребуется во время работы с прямошлифовальной машиной постоянно зажимать рукой кнопку включения.
Гравер из блендера создают так:
- аккуратно разбирают бытовую технику;
- достают внутренние детали: электродвигатель и печатную плату, которая управляет работой устройства;
- используя штангенциркуль, измеряют диаметр шпинделя, чтобы приобрести подходящий под него цанговый патрон;
- если электромотор загрязнен чем-либо, например, ржавчиной, то его тщательно, с осторожностью, чтобы не повредить обмотки, очищают;
- фиксируют купленный цанговый патрон (либо сделанный самостоятельно) на шпинделе;
- кнопку включения, уже имеющуюся на блендере, заменяют переключателем: перепаивают контакты проводов;
- приспосабливают в корпусе бытового прибора отверстие под новый переключатель;
- устанавливают электродвигатель с платой на свои места внутри корпуса;
- собирают инструмент.
В зависимости от модели переделываемого блендера может понадобиться сделать дополнительные отверстия в его корпусе, либо расширять с помощью напильника уже существующие. Проделать это не составит никаких проблем
Весь описанный процесс сборки дремеля из блендера детально продемонстрирован в видеоролике ниже.
Можно не переделывать блендер, а просто подсоединить к нему гибкий вал для гравера заводского производства. Способ состыковки показан в ролике далее.
Можно также изготовить гравер из дрели. Сборка вариантов с гибким валом и без него показана в следующих видеороликах.
Изготовление гравера из 3D-принтера
Обыкновенный 3D-принтер является хорошей основой для создания гравера, с помощью которого можно будет резать различные материалы, делать поделки и выполнять другие операции. Чтобы модернизировать имеющееся устройство, потребуется дополнительно установить плату , которая будет питать оперативные цепи оборудования и лазерный модуль.
Гравировальный станок, созданный из 3D-принтера, продемонстрирован в следующем видеоролике.
Кроме рассмотренных простейших способов создания самодельной гравировальной машинки из 3D-принтера, маленького электромотора, небольшого электродвигателя, блендера и дрели существуют также другие варианты. При этом за основу используют как данную технику, так и другие электроинструменты. Народные умельцы постоянно придумывают новые модификации, проявляя конструкторскую фантазию. Реализуя на практике любой из приведенных вариантов или самостоятельную разработку, следует обеспечить безопасность создаваемой самоделки. Для этого необходимо хорошо изолировать электрические контакты и надежно выполнить сборку оборудования.